| タミヤ 1/35 ドイツ8トン・ハーフトラックのラジコン化 | 2021.5.27 |
-
はじめに
 |
| タミヤの1/35ドイツ8トン・ハーフトラック |
今回は戦車ではなくハーフトラックです。前輪が自動車用タイヤ、後輪部分が履帯となった兵員輸送車です。
タミヤのこの8トン・ハーフトラックは、ミリタリーミニチュアシリーズとして発売される前にはモーターライズのものがあったようです。今回駆動用モーターの組込では、モーターライズのキットと同様な方法で行いました。
1.ラジコン仕様の検討
このハーフトラックのラジコン化は次のように行うことにしました。
無線送受信には、電波ではなく赤外線リモコンを使います。赤外線リモコン受信用ICの出力をPICに繋ぐだけで済みます。
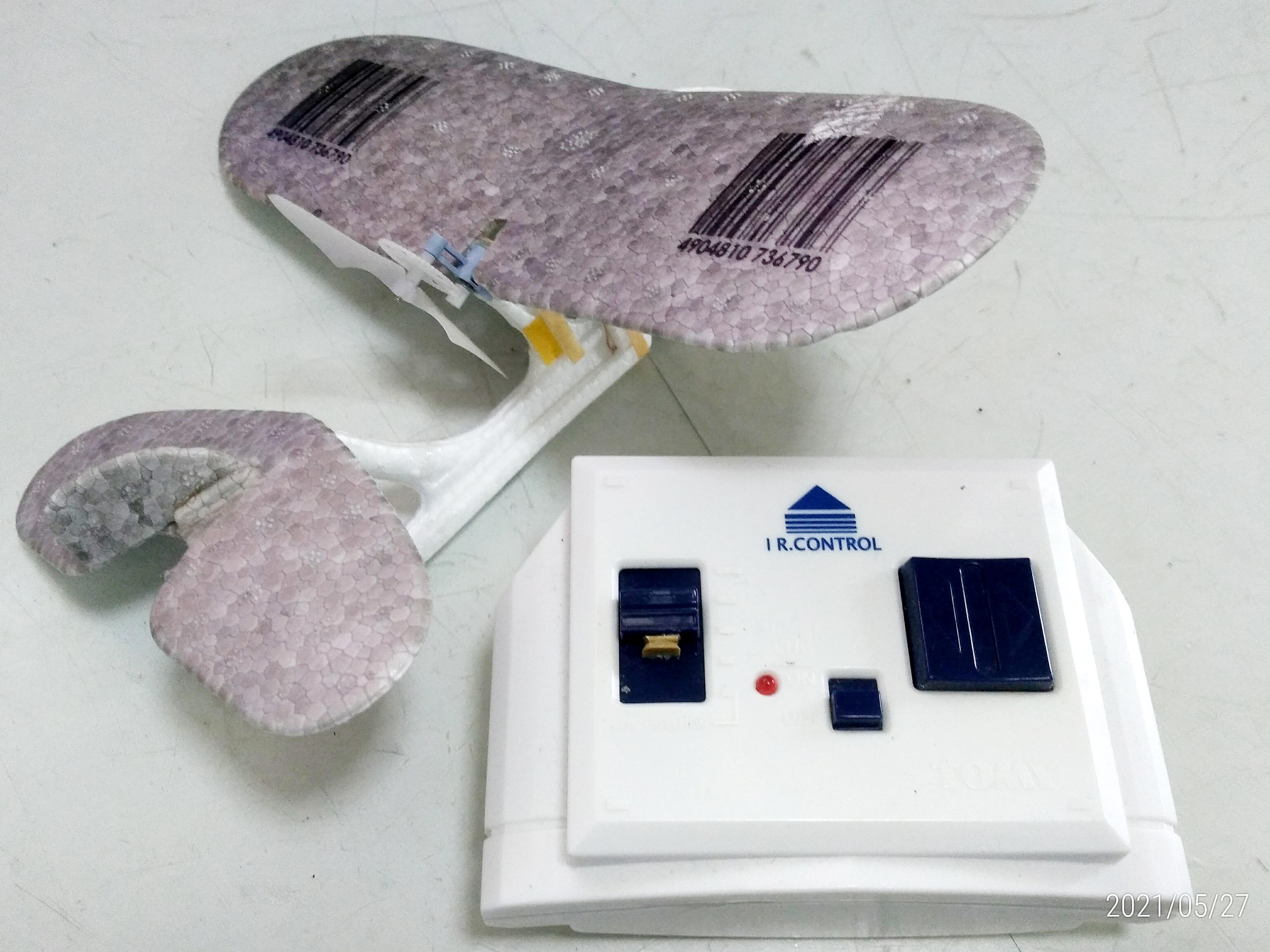
送信機は新規に製作するのではなく、トミーの室内飛行機のものを流用します。ただし、事前にこの送信機の信号フォーマットを調べる必要があります。
 |
 |
 |
| トミーの室内飛行機「AERO SOARER」 |
駆動系は、前輪の左右旋回操作用にサーボモーターを一個、後部履帯の駆動に(今回は前輪での旋回操作になりますので)前進・後退用のモーター1個とします。
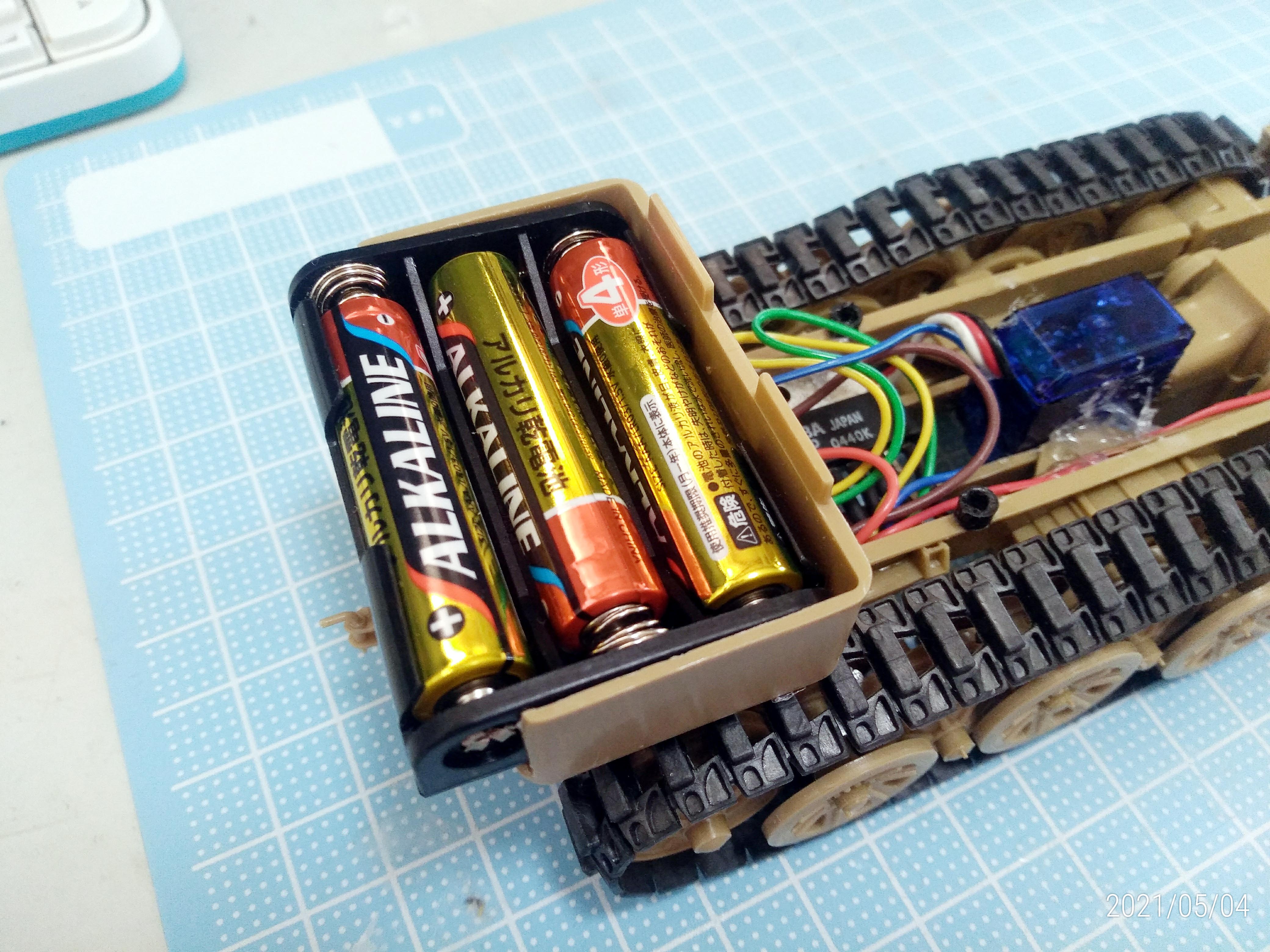
モーターの制御には、使い慣れたPIC12F675を使います。電源は、単4型電池3本の4.5Vとします。
2.駆動系の製作
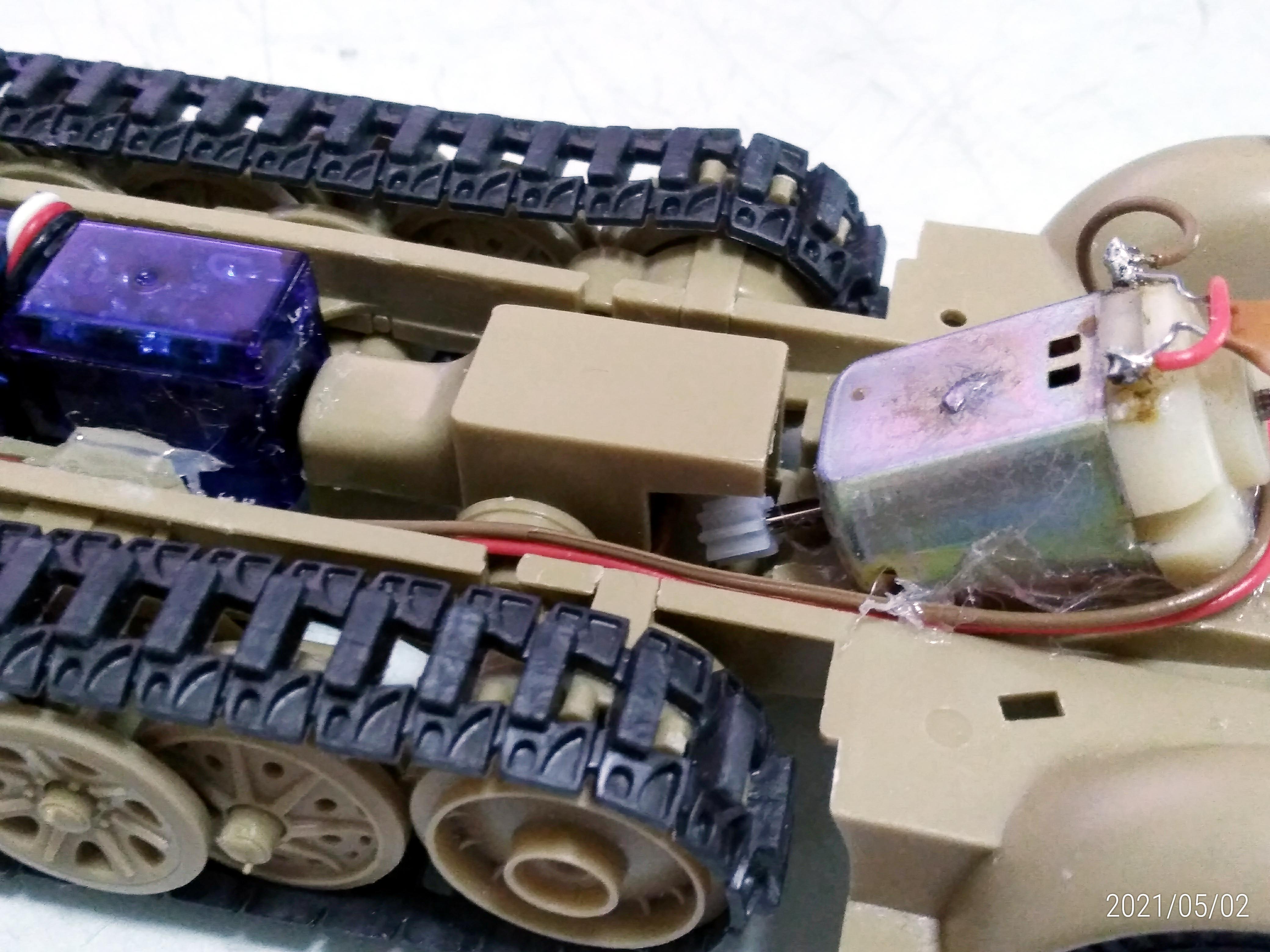
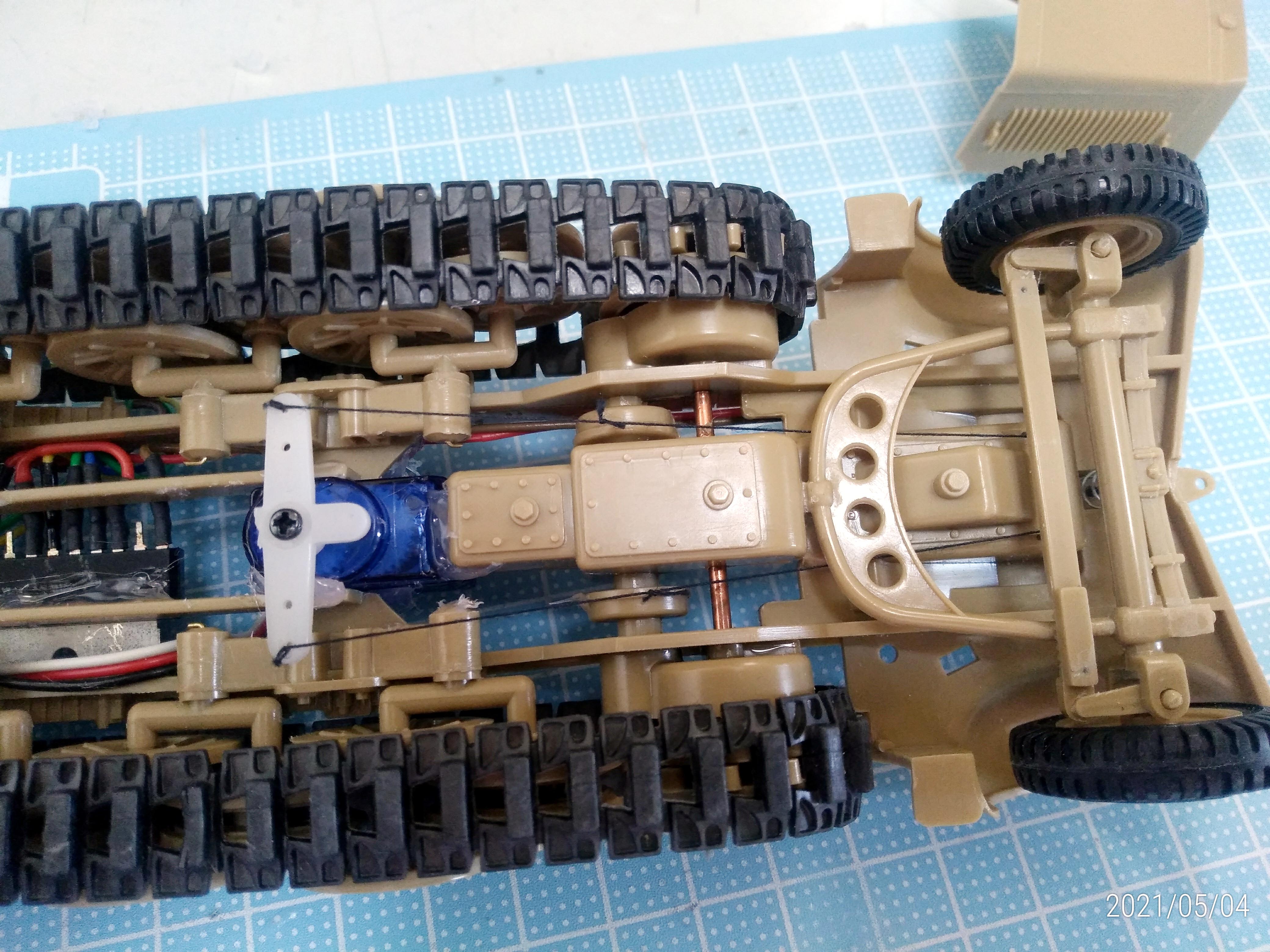
このキットは、モーターライズの時の金型が使われていますのでエンジン部分に駆動用のモーターを組み込むことが出来ます。ギヤーは、デジットで販売されていたものを使いました。
電池は、車体後部の荷物収納庫のスペースに組み込む用になっていますので、ここに単4型電池3本を搭載しました。
 |
 |
 |
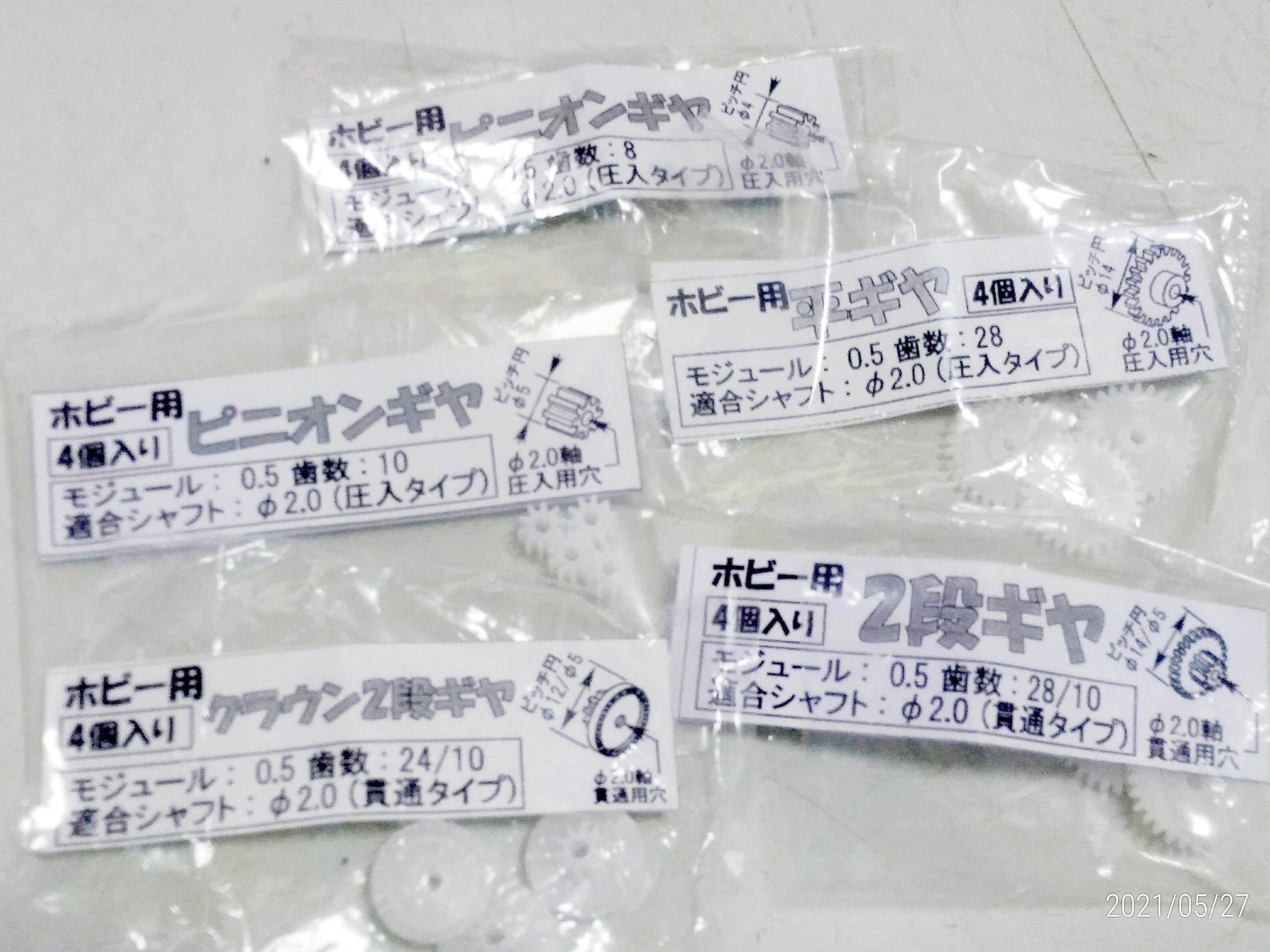 |
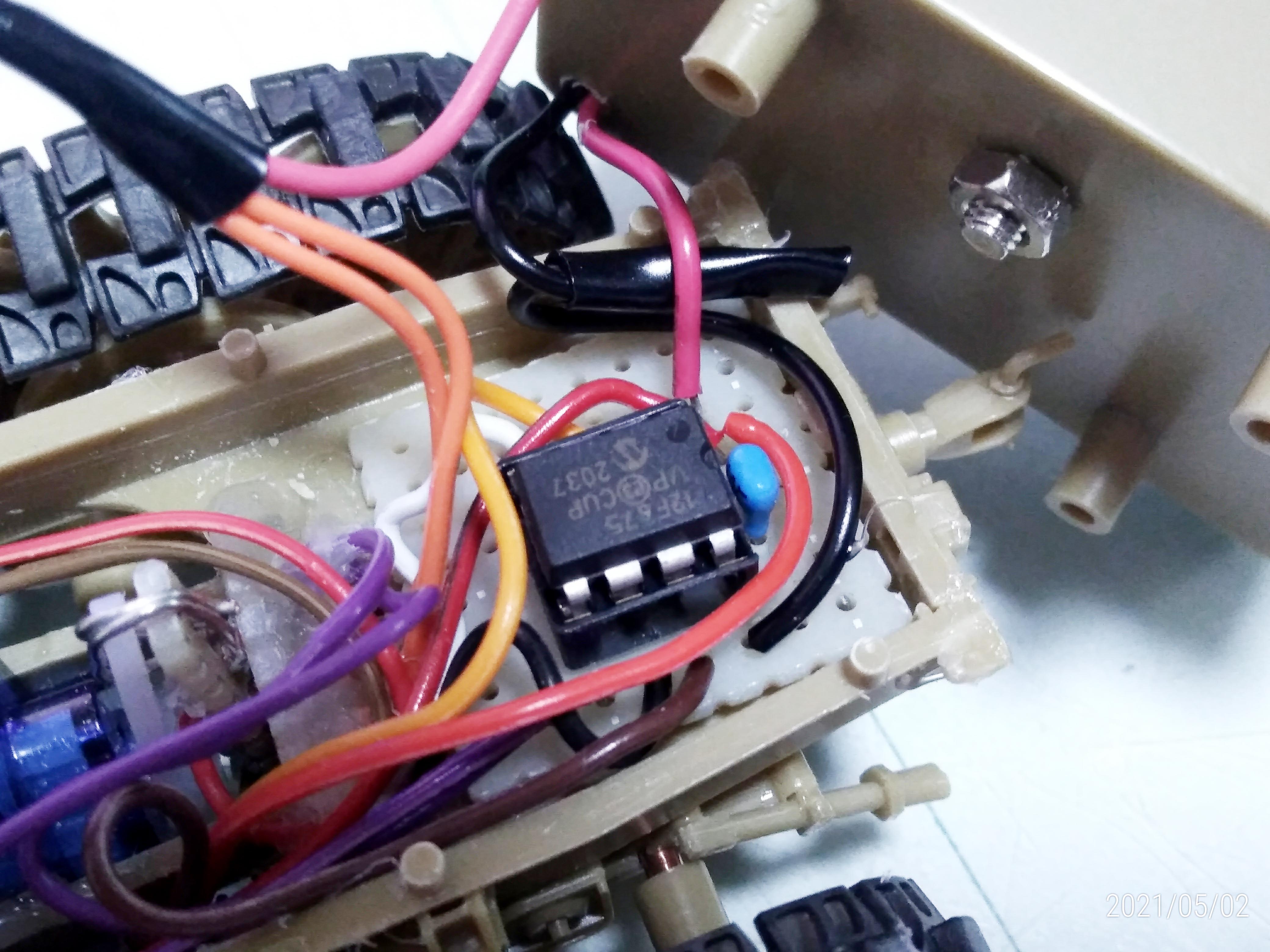
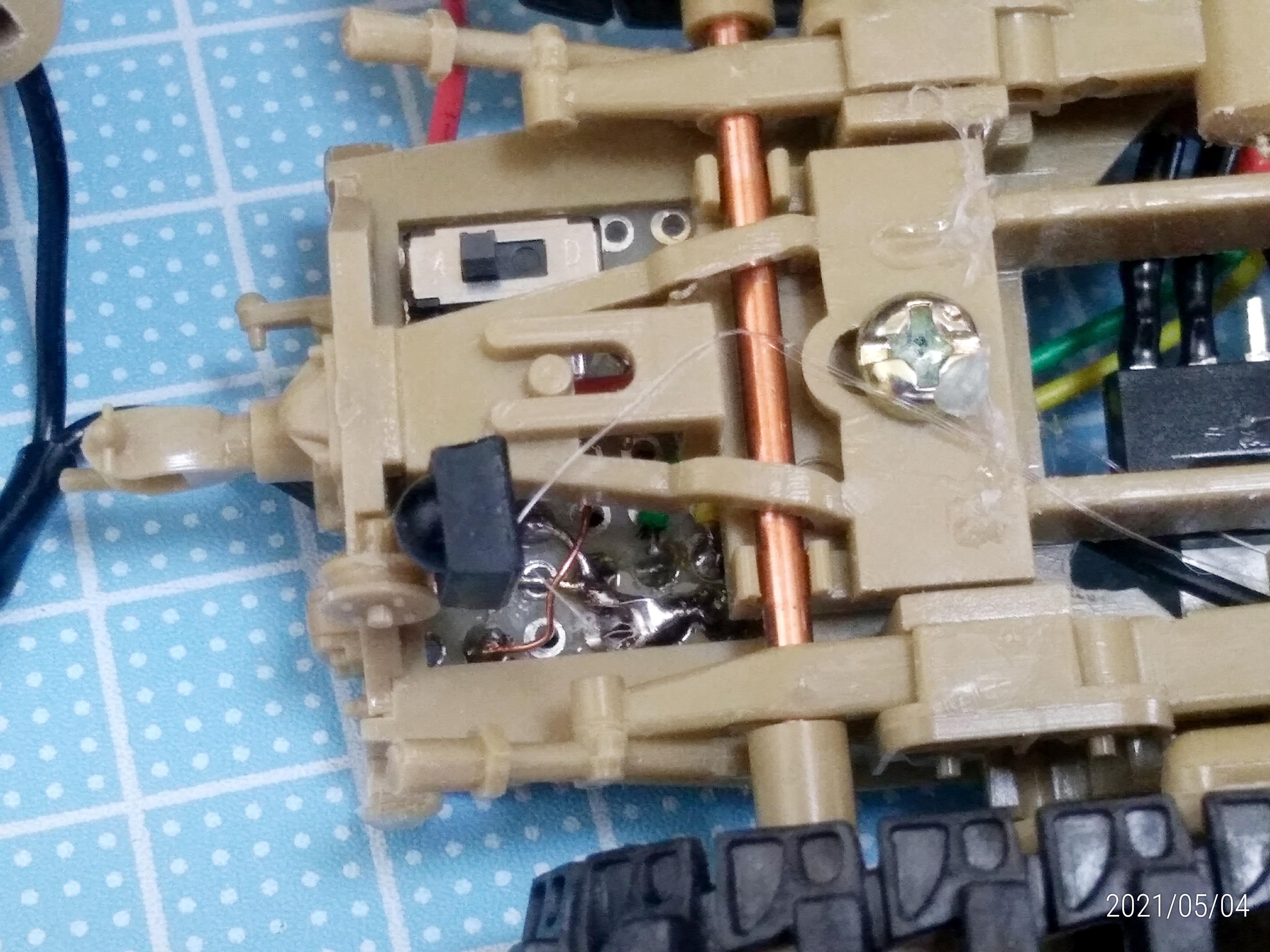
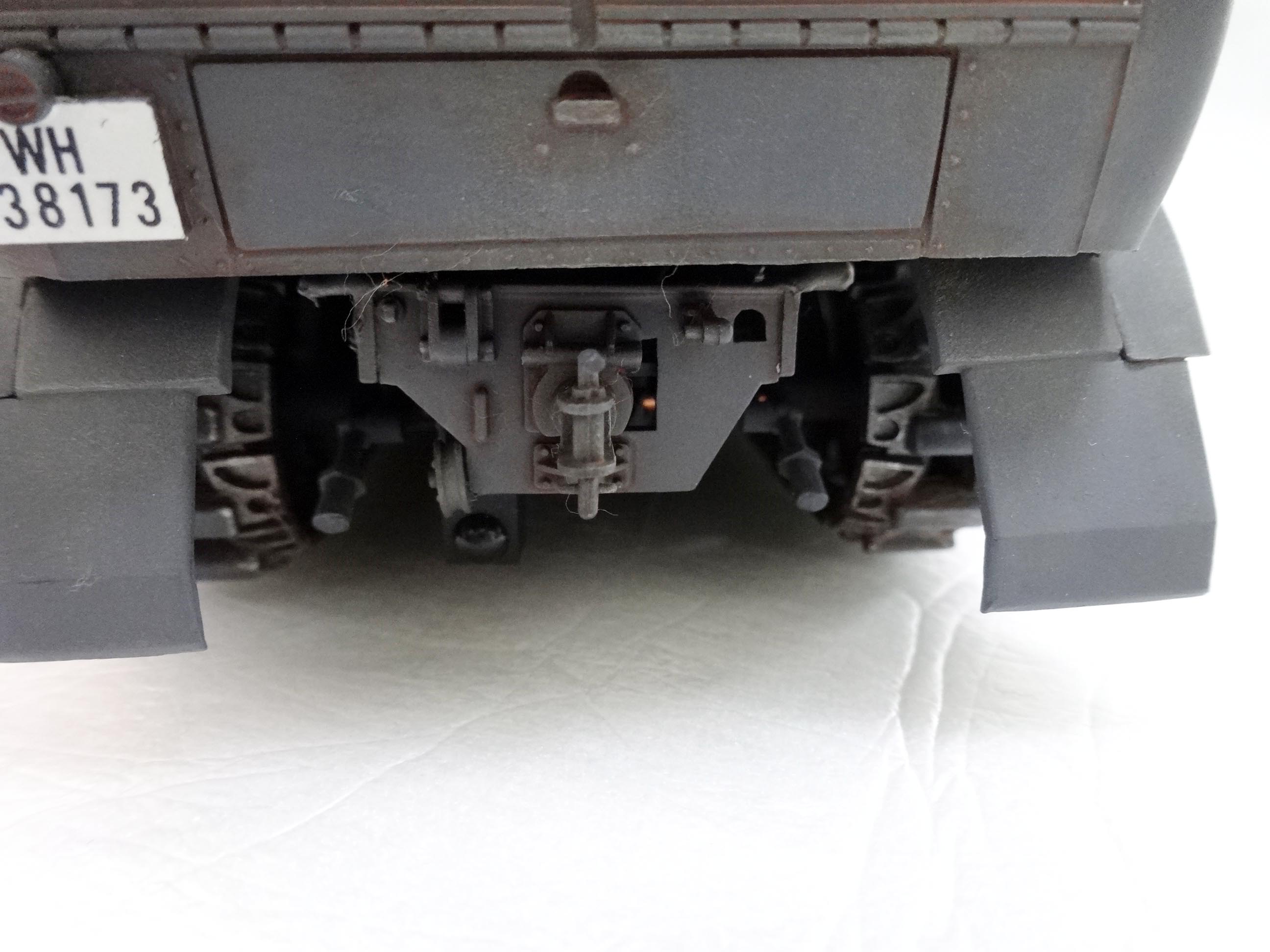
| PICマイコンとリモコン受信機と電源スィッチは基板に半田付け。 | リモコン受信機と電源スィッチは裏側に取り付けています。 | 駆動用モーターの取付。市販のギヤを使ってモーターライズキットと同じ方法で組み込みました。 | デジット(共立エレショップ)でギヤを購入 |
 |
 |
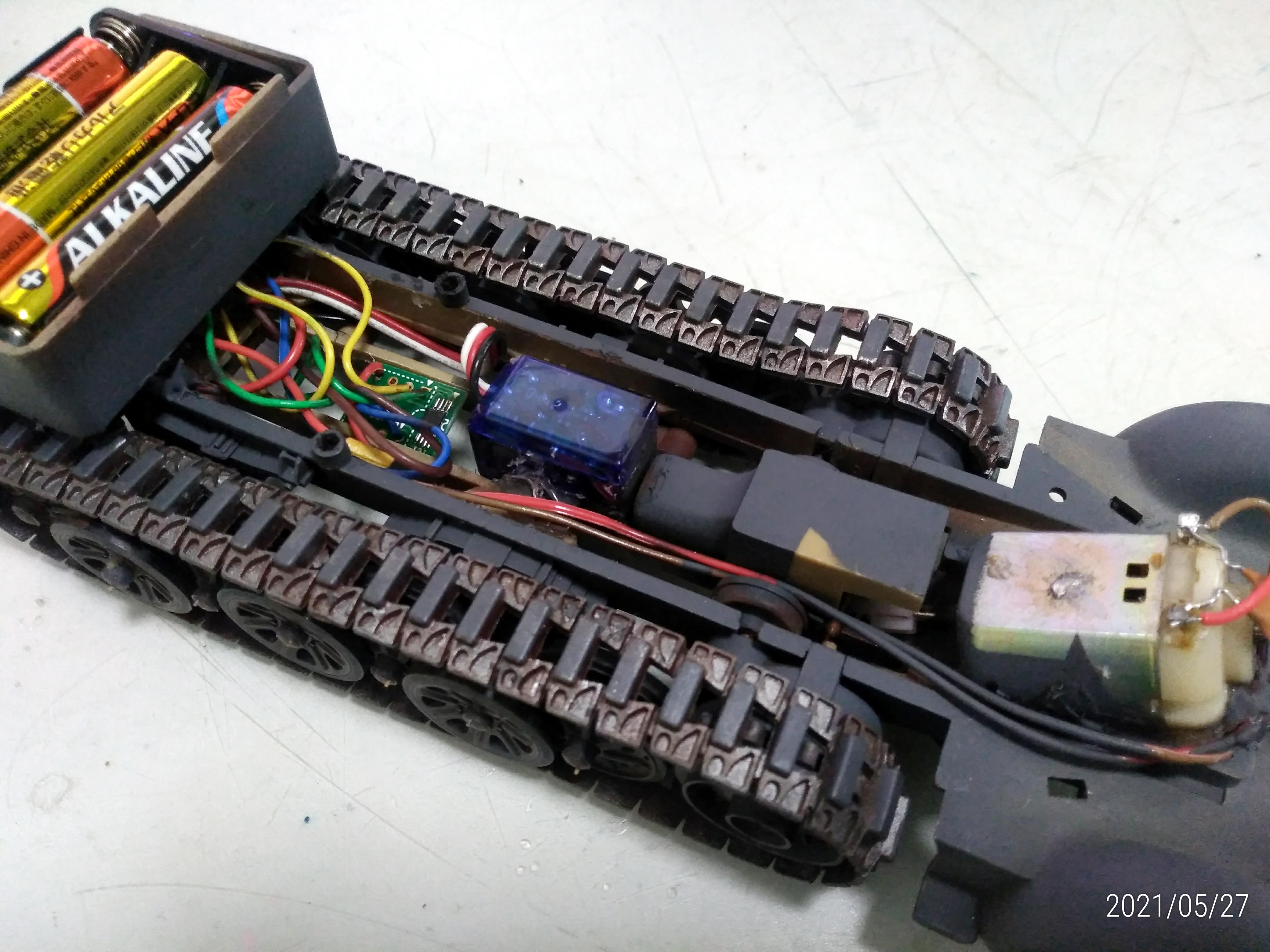 |
| ステアリング操作用のサーボモーターの組込。サーボホーンから糸を張っています。 | モータードライバーはNJU7386です。 |
3.組立と塗装
幌は張った状態と畳んだ状態のどちらかを選択できますが、搭乗している兵士が良く見えるように畳んだ状態にしました。
後部のバスケットには、ジェリカン、テント、バケツ、機銃と弾薬箱をアクセントに載せてみました。
塗装ですが、キットの箱絵ではダークイエローにグリーンとブラウンの3色迷彩となっていますが、ジャーマングレーの単色塗装としました。軽い汚しをしています。
兵士はキットそのままに組立てて、軍服はフィールドグレイで塗装しました。相変わらず兵士の顔の塗装が下手くそです。
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|
4.マイコン制御回路
赤外線送信機の信号フォーマットは調査した結果次のようになっていました。
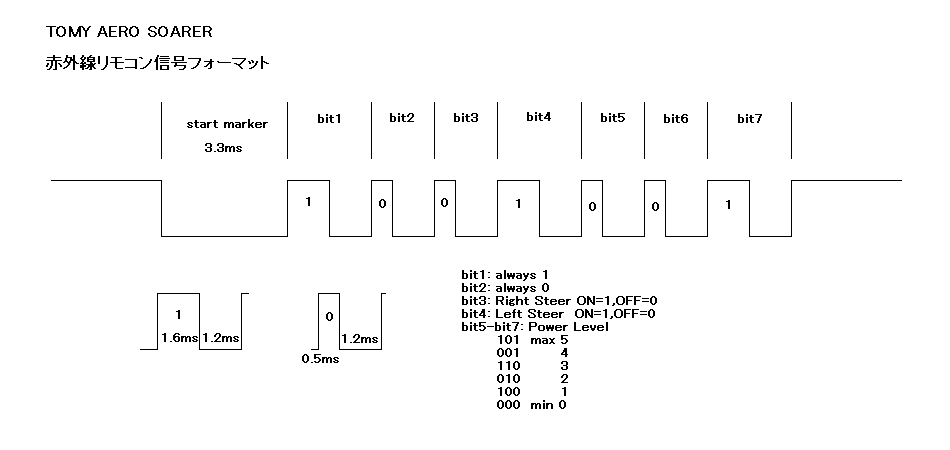
約3msecのロー信号の後に、7ビットのパルスが送信されます。パルスは、1の時1.6msのハイ、0の時0.5msのハイとなっていました。
7ビットの最初の2ビットは常にビット1が1でビット2が0です。恐らくこれはチャネル番号を表しているものと思われます。トミーの室内飛行機のリモコンには2種類あって同時に飛行できるようになっているようです。
送信機の左右旋回のボタンを押すとビット3やビット4が0から1に変化します。右側にボタンを押すとビット3が、左側に押すとビット4が変化します。
送信機のパワースライダーを上下するとビット5からビット7が変化します。スライダーを一番下にすると000(0)が出力されます。上にすると101(5)が出力されます。0から5までの6段階のパワー制御になっています。
PICのファームウエアでこの信号を受信・解析し、ビット3やビット4が1なら、ステアリングサーボーを回転してハンドル操作を行います。パワー信号については、0,1で後退、2,3なら停止、4,5なら前進するようにしました。
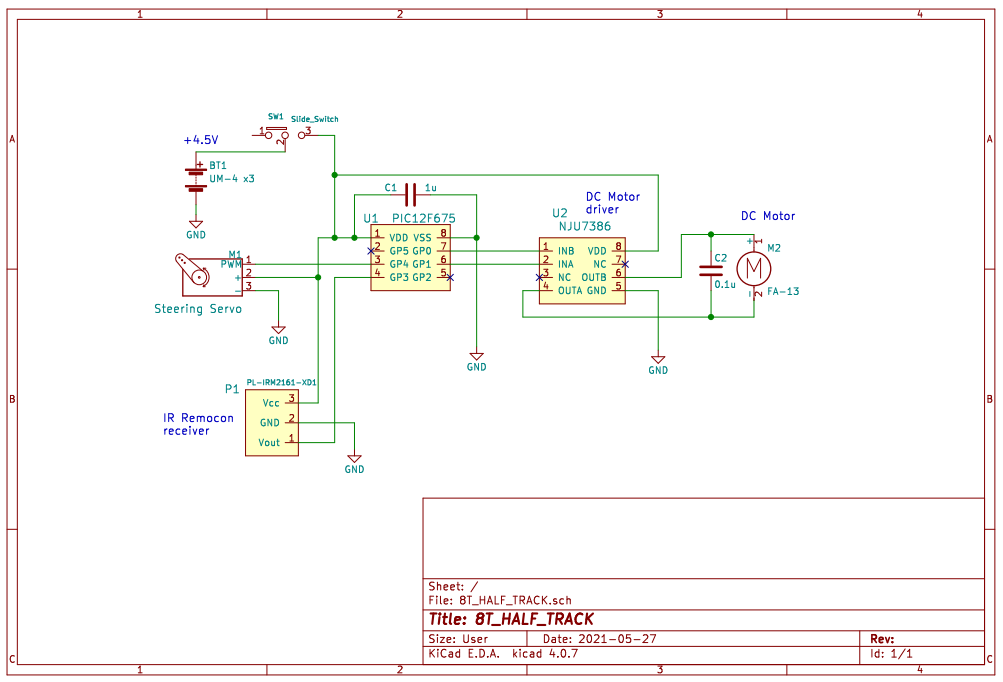
ステアリングサーボ用のPWM信号は、PIC内蔵の8ビットタイマーを使って生成しています。履帯駆動用モーターは、DCモータードライバーIC「NJU7386」を使いました。PICから出力する2ビットのオン・オフで制御します。
全体回路図です。
 |
PICのファームウエアは、MPLAB IDE上で、MPASMを使って作成しました。
作成したアセンブラソースコードは、main.asmです。
駆動用モーターの前進・後退・停止の制御に、最初はサーボモーターで逆転スィッチを操作するようにしていましたので、ソースコードにはSwicth Servoの制御コードが残っています。
現在は、GP0,GP1でNJU7386の制御信号を出力するようにしています。
当初、逆転スィッチを自作したのですが動作が不確実だったので途中からTA-7291Pのモータードライバーを使うように変更しました。しかしながらTA-7291PはバイポーラトランジスタによるスィッチなのでIC内部での電圧ロスが大きくモーターの回転が鈍かったので、最終的にFETスィッチを使った低電圧用のNJU7386に変更しました。