| タミヤ 1/35 M48A3 PATTON 戦車のラジコン化 | 2021.1.20 |
* 当ページの写真はクリックすると拡大写真や動画を表示します。
はじめに16年程前に「リモコン戦車のラジコン化」をしましたが、同じように、戦車模型をラジコン化する人はたくさんおられるようで、 ブログやYoutubeには、製作記事や製作動画がたくさんアップされています。模型の世界での技術進歩も相まって、その改造内容は、私が以前に行ったものよりも 遥かに上を行くものとなっています。
 |
| DS4コントローラで無線操縦するパットン戦車 |
これらの記事や動画を見るにつけ、またラジコン化に挑戦してみたくなりました。
手元に、BLUETOOTH接続可能なSONYのDS4コントローラがあります。bluetoothのホスト機能を持ったUSBマイコを戦車側に積み込めば、DS4で操縦するラジコン戦車が出来ます。
ラジコン化する戦車模型には、タミヤの1/35パットン戦車を選定しました。この戦車模型は、トーションバーのサスペンション可動化がやりやすい構造になっていることと価格も安かったからです。
実は、この戦車、随分と昔中学生の頃に一度作ったような記憶があります。今回購入した物はそのリニューアル版となりますが、昔を懐かしむとともに、32ビットのUSBマイコンを使ってどこまで出来るか挑戦です。
1.ラジコン化したパットン戦車
まずは、出来上がりを動画や写真で紹介してみたいと思います。デカールの貼り付けや塗装はまだ出来ていません。これからの作業となります。
戦車車体下部の電源スィッチを入れると、前照灯が点滅し、bluetoothによるDS4コントローラの接続待ちとなります。DS4コントローラのPSボタンを押して暫く待っていると接続が完了し前照灯が消灯します。
1−1.ライト類コントローラのボタン操作で、前照灯の点灯・消灯、サーチライトの点灯・消灯ができます。
 |
 |
 |
 |
 |
前照灯は、ウォームホワイトのチップLEDをパーツの中に埋め込み、半透明プラ板でカバーしました。
サーチライトにはホワイトの3mmφLEDを組み込み、内部にはアルミ箔を貼り付けています。LEDへの配線は模型付属のビニールパイプの中を通しています。
 |
 |
 |
 |
LEDは台座内部に組込 |
後部のライトは前照灯の点灯時には車幅灯として暗点灯します。コントローラのブレーキボタンを押すと明点灯します。走行停止時にもブレーキがかかりますので明点灯します。
機銃や砲身先端には発射光を模擬するLEDを組み込みました。
機銃台座内部にオレンジ色の5mmφのLEDを組み込み透明ビニールの銃身を通して発光させています。機銃発射音に合わせて明滅します。
砲身先端には、3mmφのウォームホワイトのLEDを組み込みました。発射音とともに瞬時発光します。
1−2.サウンドコントローラのエンジンスィッチを押すと、エンジンが掛かり、エンジンの回転開始音が車体から聞こえます。開始音に続いて、エンジンスィッチを切るまでは、アイドリング音がずっと鳴っています。
 |
 |
 |
機銃ボタンを押すと機銃発射音がなります。先に説明したように音に合わせて機銃先端が明滅します。
主砲発射ボタンを押すと砲弾発射音が鳴り響きます。この時、砲身先端が一瞬閃光するとともに発射の反動で砲身が後退するとともに車体全体が揺れます。
1−3.砲塔旋回・砲身上下動 |
コントローラの右側スティックを左右に倒すと砲塔が左右に旋回します。スティックの傾きに応じて旋回速度が増減します。少し傾けるとゆっくりと旋回し、大きく傾けると素早く回転します。
回転は360度旋回させることが出来ますが、片方向に連続で旋回させると砲塔内部の電子部品と車体内部の回路基板を繋ぐ配線ケーブルが捻じれてしまいます。一回転から2回転程度に留めた操縦が必要です。
更に右側スティックを前後に倒すと砲身が上下します。模型の構造上、砲身の上向き角度は大きく取れませんでした。そのため動きは今ひとつという感じです。
1−4.走行・旋回コントローラの左側スティックを前後に倒すと前進・後退します。スティックの傾きに応じて速度が増減します。
またスティックを前後に倒したまま少し左に傾けると左に、右に傾けると右に緩旋回します。
 |
 |
 |
(信地旋回しながら砲塔旋回あり) |
(金属履帯は滑ってしまう) |
(やはり滑っている) |
左側スティックを左右に倒すとその場で旋回(超信地旋回)します。こちらも傾き角度で旋回速度を増減できます。
スティックを元に戻すと走行・旋回を停止します。この時、車体後部のブレーキランプが1秒間、明点灯します。
 |
 |
 |
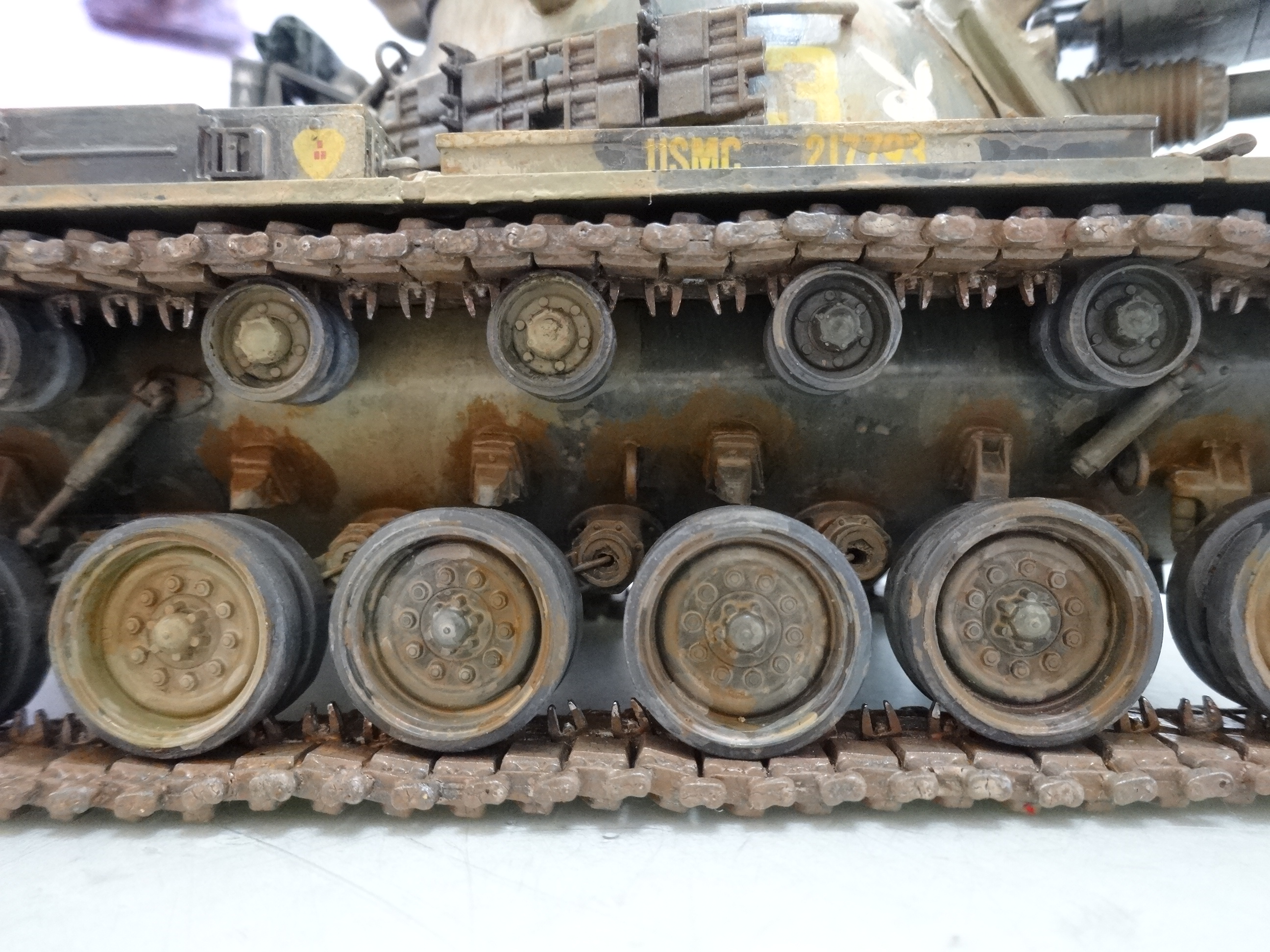
履帯は、フリウルの連結式金属履帯に交換しました。この戦車では、履帯の上部支持転輪がある関係から履帯の弛みがあまり出ないのが残念です。
履帯板は、製品では片側85枚分ありますが、79枚で構成しました。78枚がぴったりなのですが、取り外しの余裕を考えて一枚多くしています。ちなみに、模型付属のベルト式履帯では78枚となっています。
転輪(ロードホイール)のトーションバーは、0.6mmと0.8mm(両端2個)のピアノ線を使って可動化しました。この方法はサス可動化の定番のようです。障害物を乗り越える際にホイールが上下に動きます。
2.改造用パーツ
ディスプレーモデルからラジコンで動く可動モデルに改造するのに使用したパーツを次に紹介します。
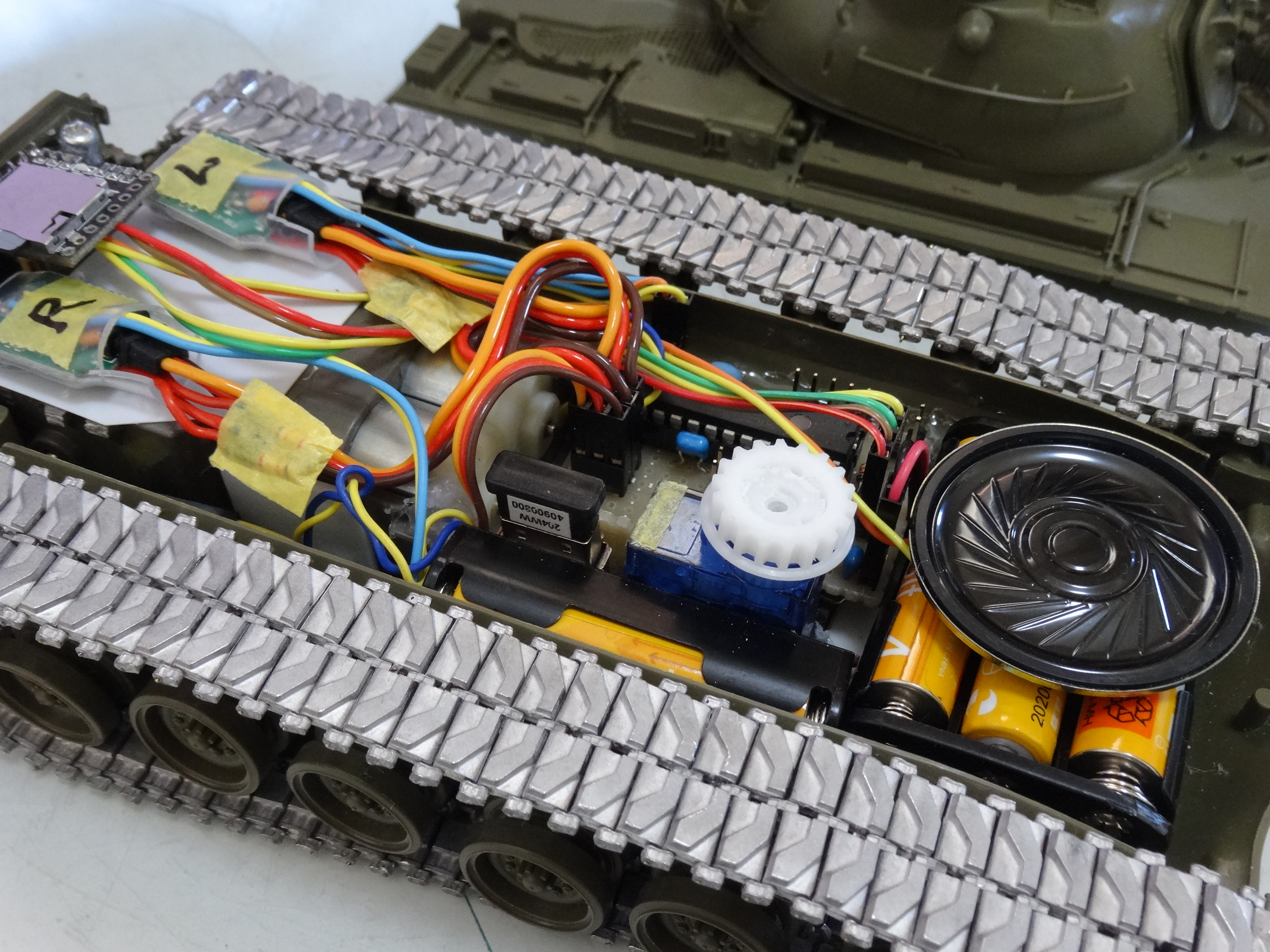
2−1.走行用ギヤボックス・モーター制御タミヤの楽しい工作シリーズの「ツィンモーターギヤーボックス」を使いました。ギヤーボックスをきちんと収めるためには車体後部の一部繰り抜きが必要でした。
ギヤーボックスの2個のモーターのドライブ回路に、サーボモータ「RDS3115MG」を分解して取り外した制御基板を使いました。
 |
 |
 |
 |
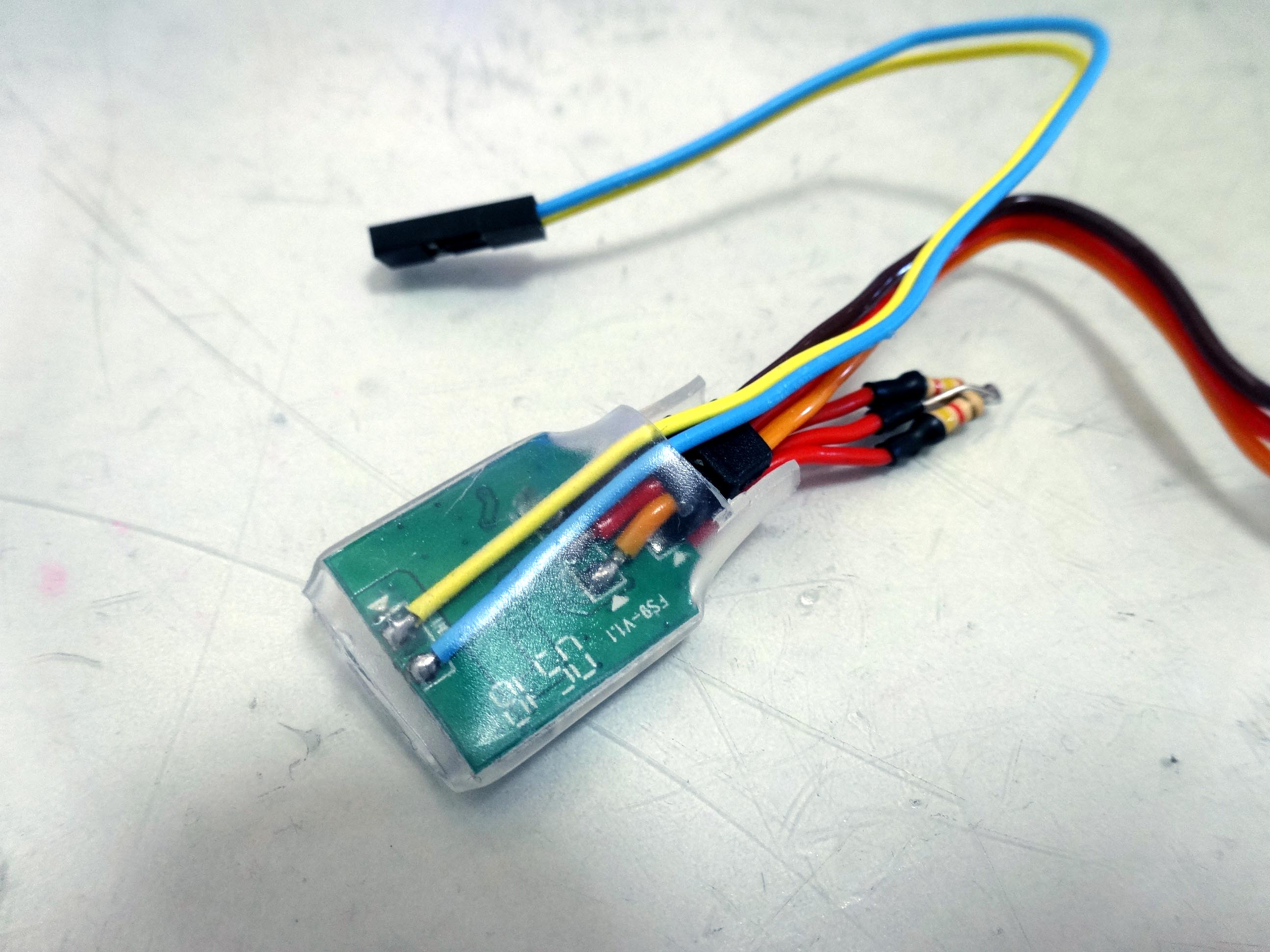 |
| 車体の一部を繰り抜きプラ板で塞ぎました | サーボモータの制御基板を流用 | 水色と黄色のケーブルがモーターへの配線 |
サーボモータの制御基板には、位置決めのポテンションメータ(ボリューム)への配線、モータへの電源供給配線、PWM信号入力・電源入力の配線があります。
ボリューム(5KΩ)への配線には、2.4KΩの抵抗を2ケ繋いで、ボリュームの位置が中央にあるように模擬しておきます。
これでモータは360度回転します。マイコンから入力するPWM信号に応じて回転方向の切り替えや走行速度を変えることができます。
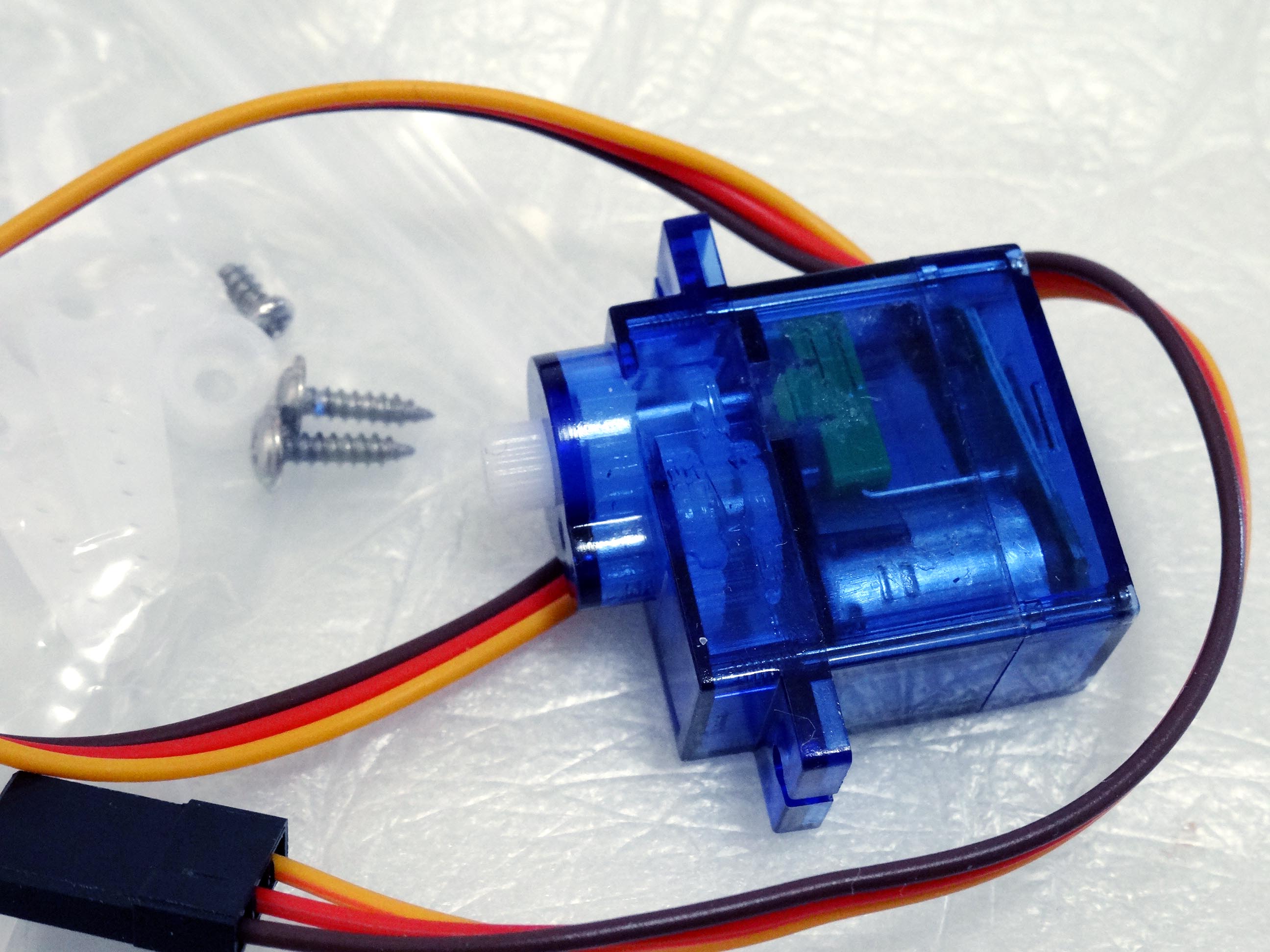
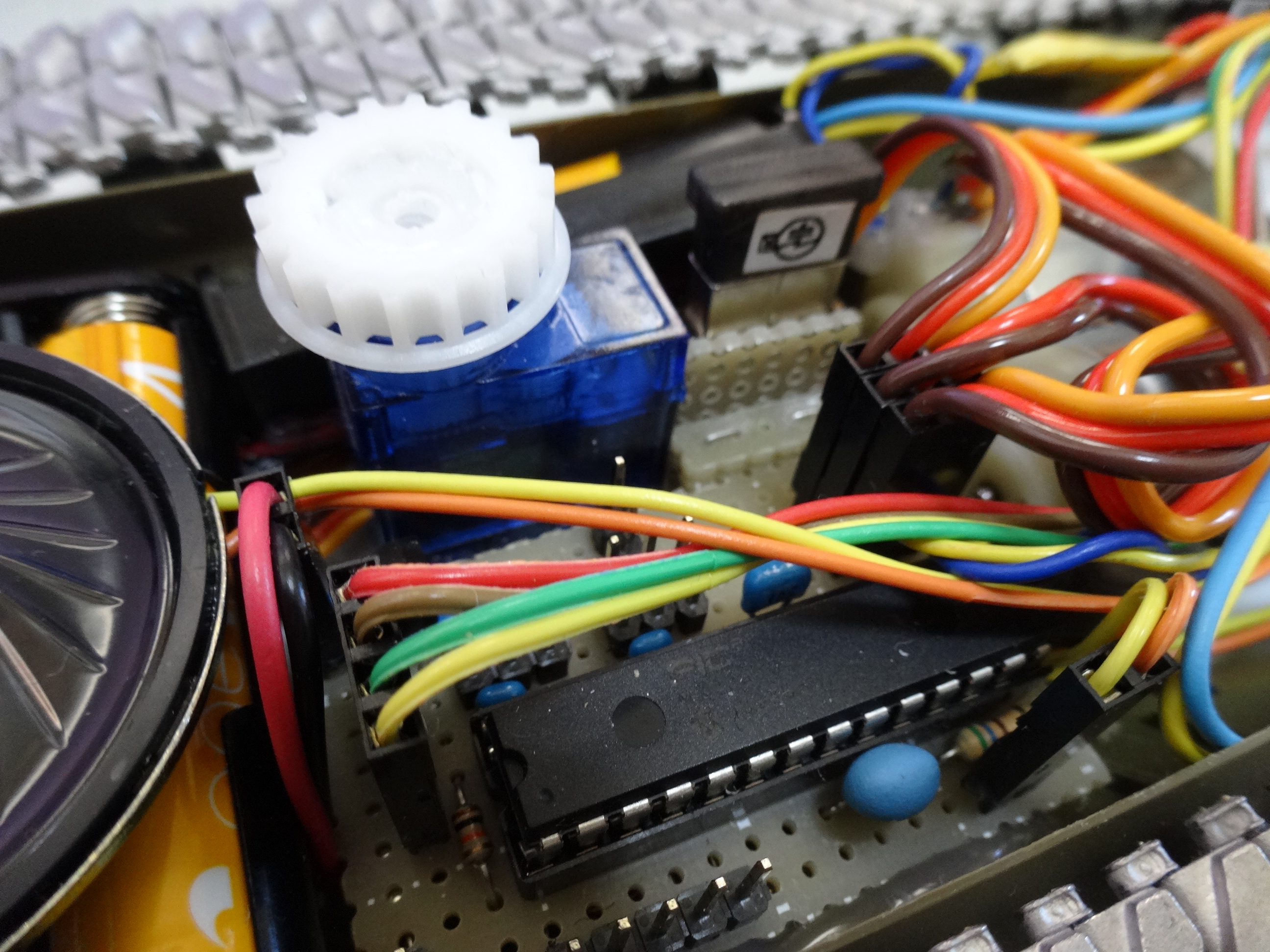
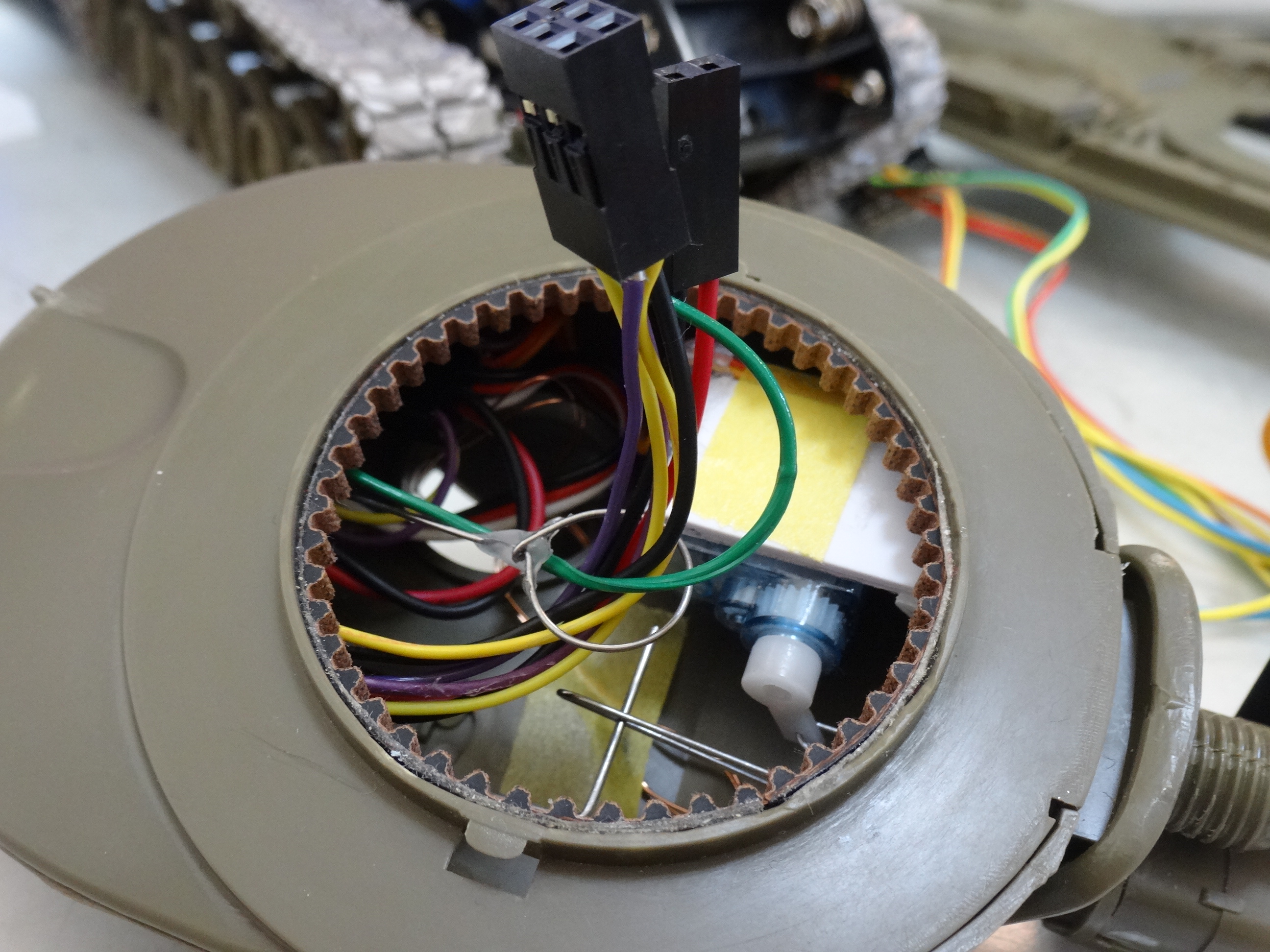
2−2. 砲塔旋回用モータ砲塔旋回用のモーターとして、9gのマイクロサーボモーターを使いました。一度分解して中にあるポテンショメータへの接続軸を切断し360度回転に改造しました。
砲塔の回転機構には、ギヤベルトとギヤを使いました。いずれもタミヤのラジコン用パーツです。これも定番の改造方法のようです。製作例がたくさんあります。
 |
 |
 |
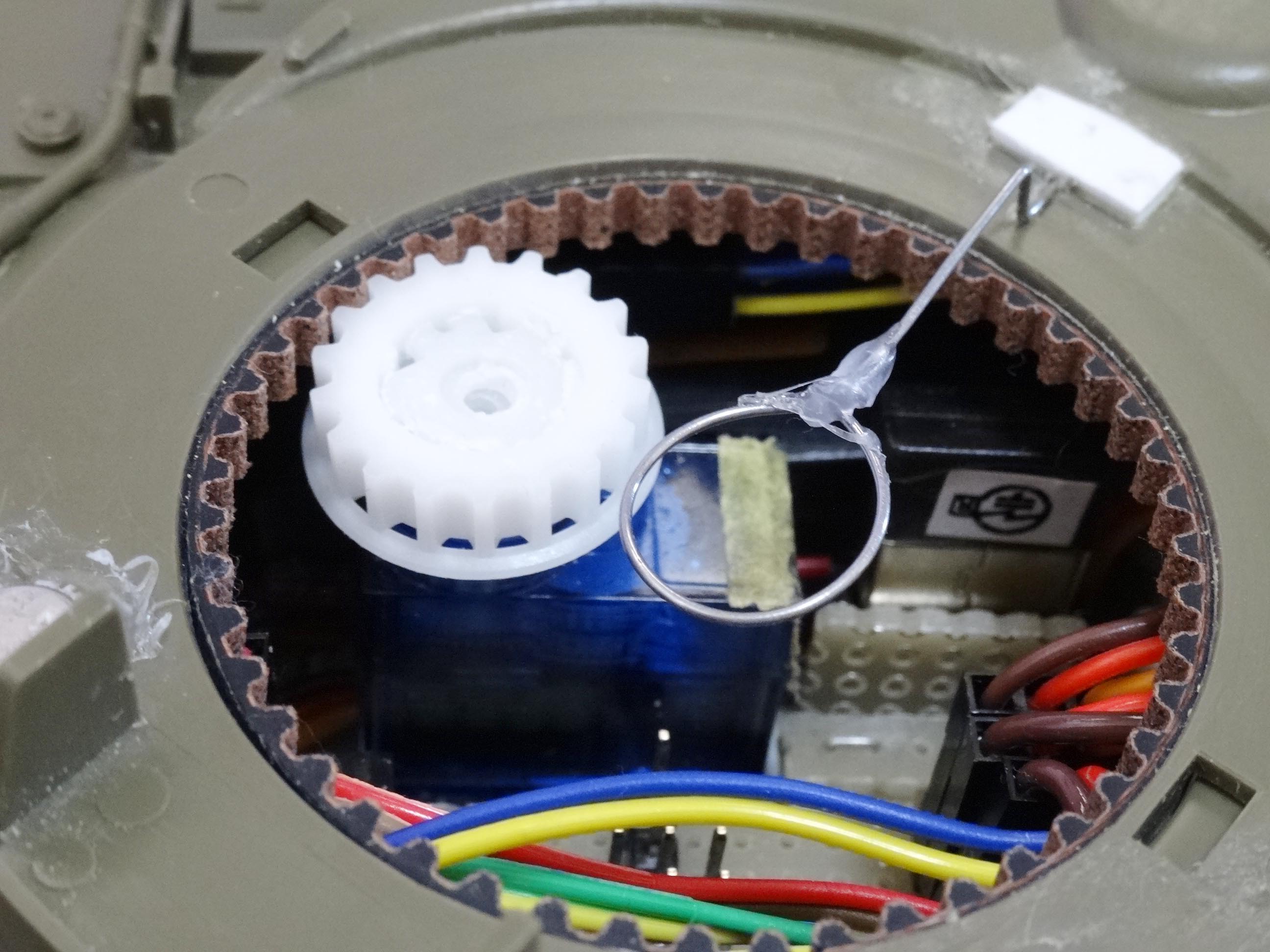 |
| このようにセットします。 中央のリングはケーブルを通す穴です。 |
2−3. 砲身上下動・反動用モータ
こちらも、マイクロサーボモータを2ケ使いました。5.4gの物と、4.4gのものです。5.4gのモーターで砲身上下、4.4gのモーターで砲身を前後に動かします。こちらはサーボモータ本来の使い方をしますので無改造です。
 |
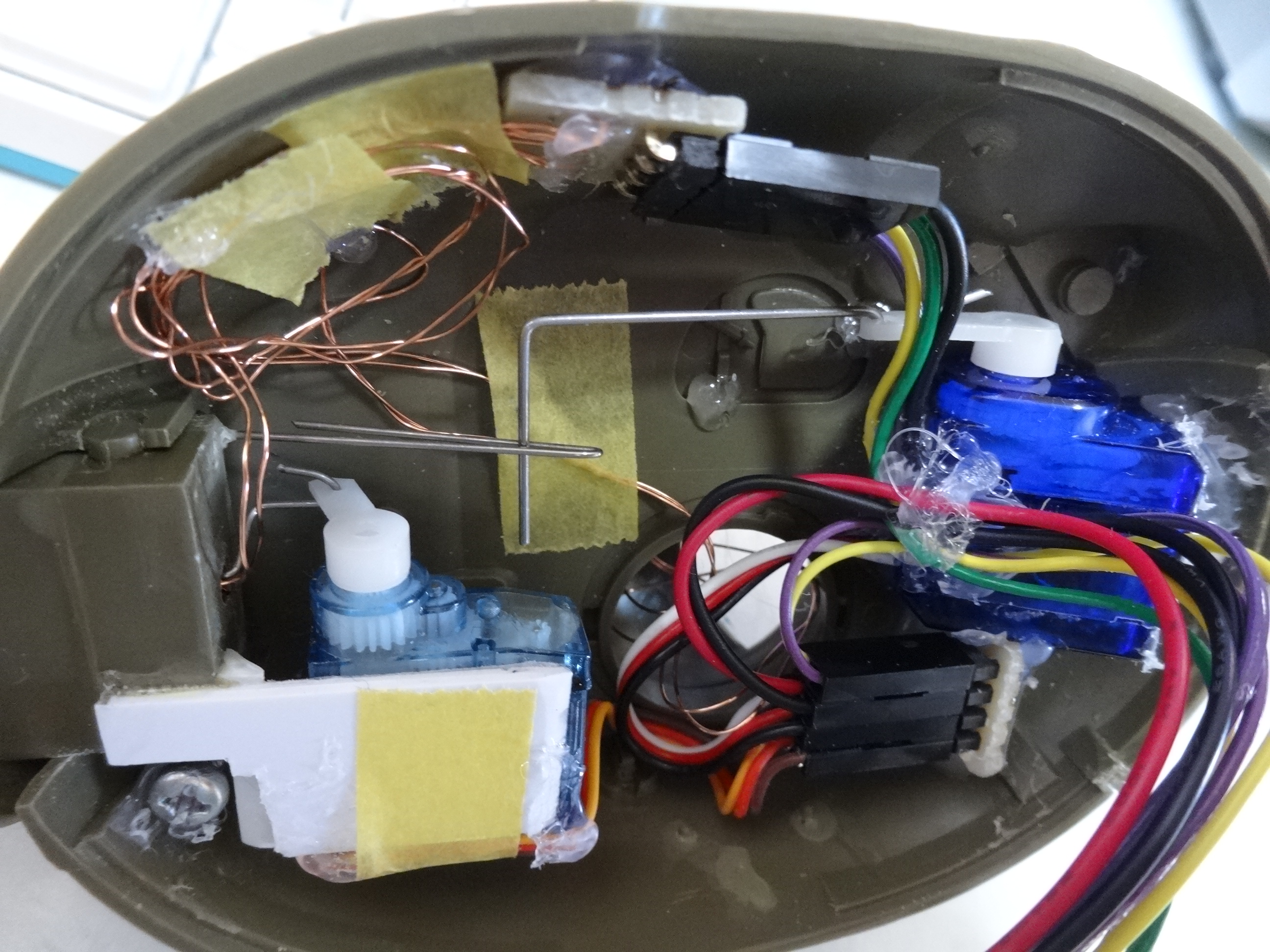 |
ピアノ線でリンク機構を作りました。砲塔内部はLEDへの配線やコネクタでごちゃごちゃしています。全てホットボンドで接着しました。
2−4. マイコン・LED
 |
| リード付きチップLED |
マイコンのファームを少し変更すれば、USBの無線式ゲームコントローラを使うことも出来ます。こちらの方が接続に時間がかからないので良かったかも知れません。
ライト類や発射の発光を模擬するために、チップLEDや3mmφのLEDを使用しました。LEDは高輝度仕様のものを使い、1KΩの電流制限抵抗を繋いでいます。チップ抵抗を一部使っています。
これらのパーツは全て秋月電子から通販で購入しました。
2−5. サウンドモジュール
 |
| スピーカーとセットの類似品 AMAZONで購入 |
基板の片列側のピンは、戦車内への組込の邪魔になるので外しました。
PICマイコンとはUARTで接続します。制御方法も簡単です。ただし2つのファイルを同時再生できないのが残念です。その代わりに合成音を入れておくという方法もありますが今回はやっていません。
2−6. 電源モーターを含め全体の電源として、単4型のNI-MH充電池4本(1.2Vx4=4.8V)を使用しました。マイコンへは、3.3Vのレギュレータを通して電源供給しました。
モータとDFPlayerには、4.8Vをそのまま供給しています。一般的には、モータ電源とマイコン電源は分離した方が良いのですが、この接続構成でも今回特に問題はありませんでした。
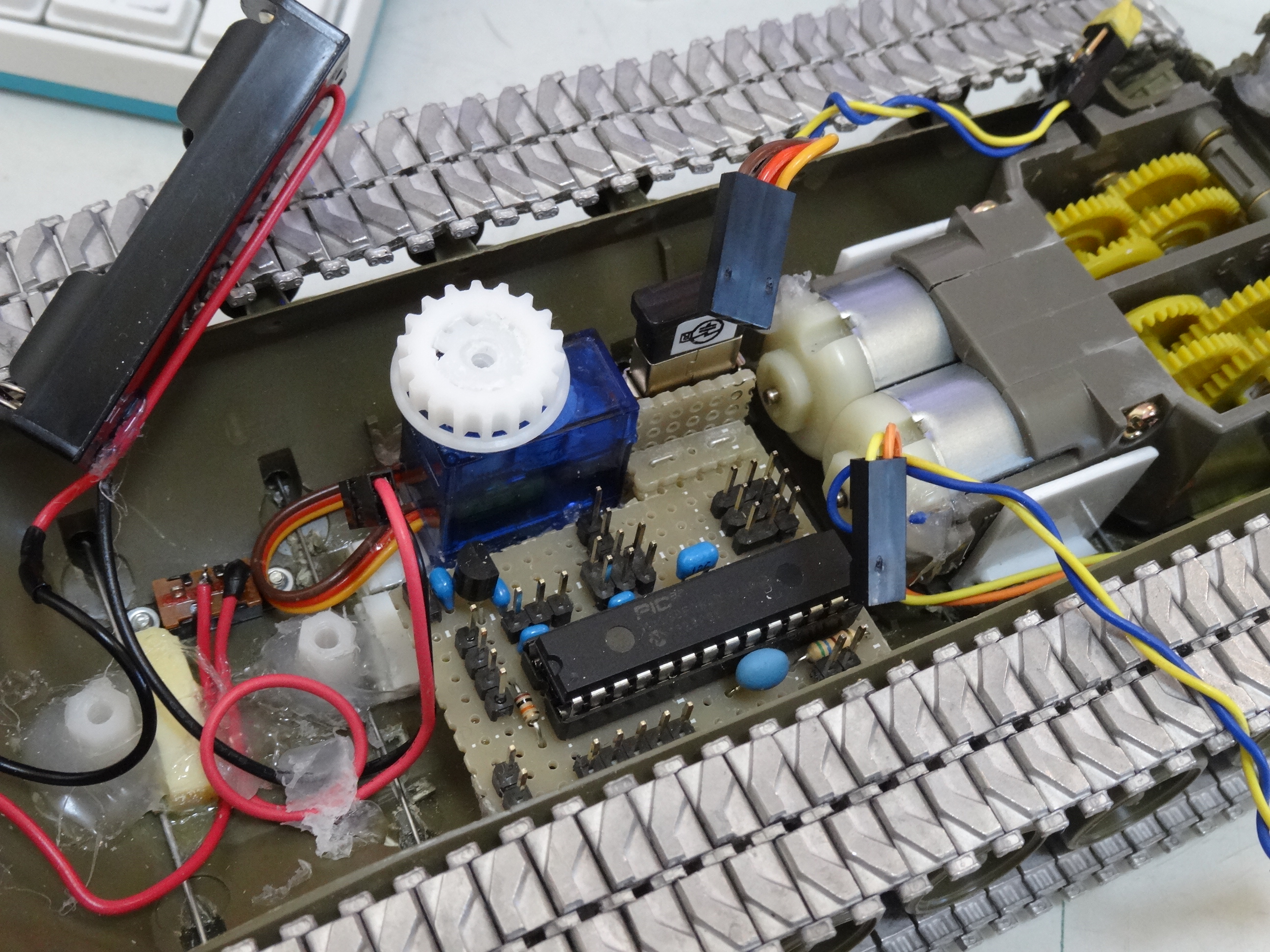
3.改造用パーツの組込
車体後部にギヤボックスとモータ制御基板を収めました。また、ギヤボックスの上には、DFPlayerを載せています。
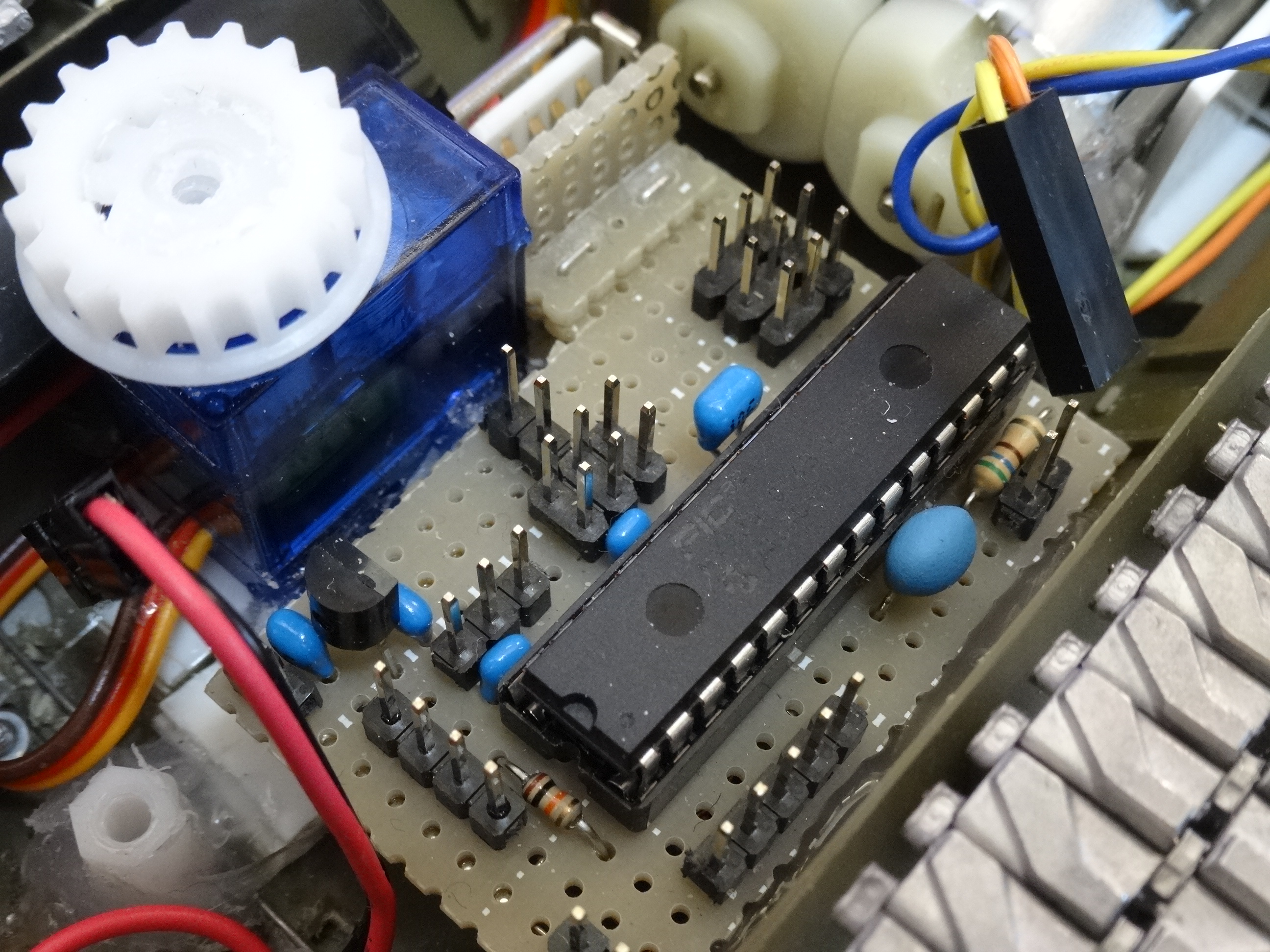
車体中央には、砲塔旋回用のマイクロサーボモータ、マイコン基板、USBコネクタ(bluetoothドングル)を収めました。
車体前部には、充電池を収めました。電池の上にはスピーカーを載せました。
砲塔内部には、2ケのマイクロサーボモータを収めています。モータやLEDへの配線は全てコネクタで取り外しが出来るようにしました。
 |
 |
 |
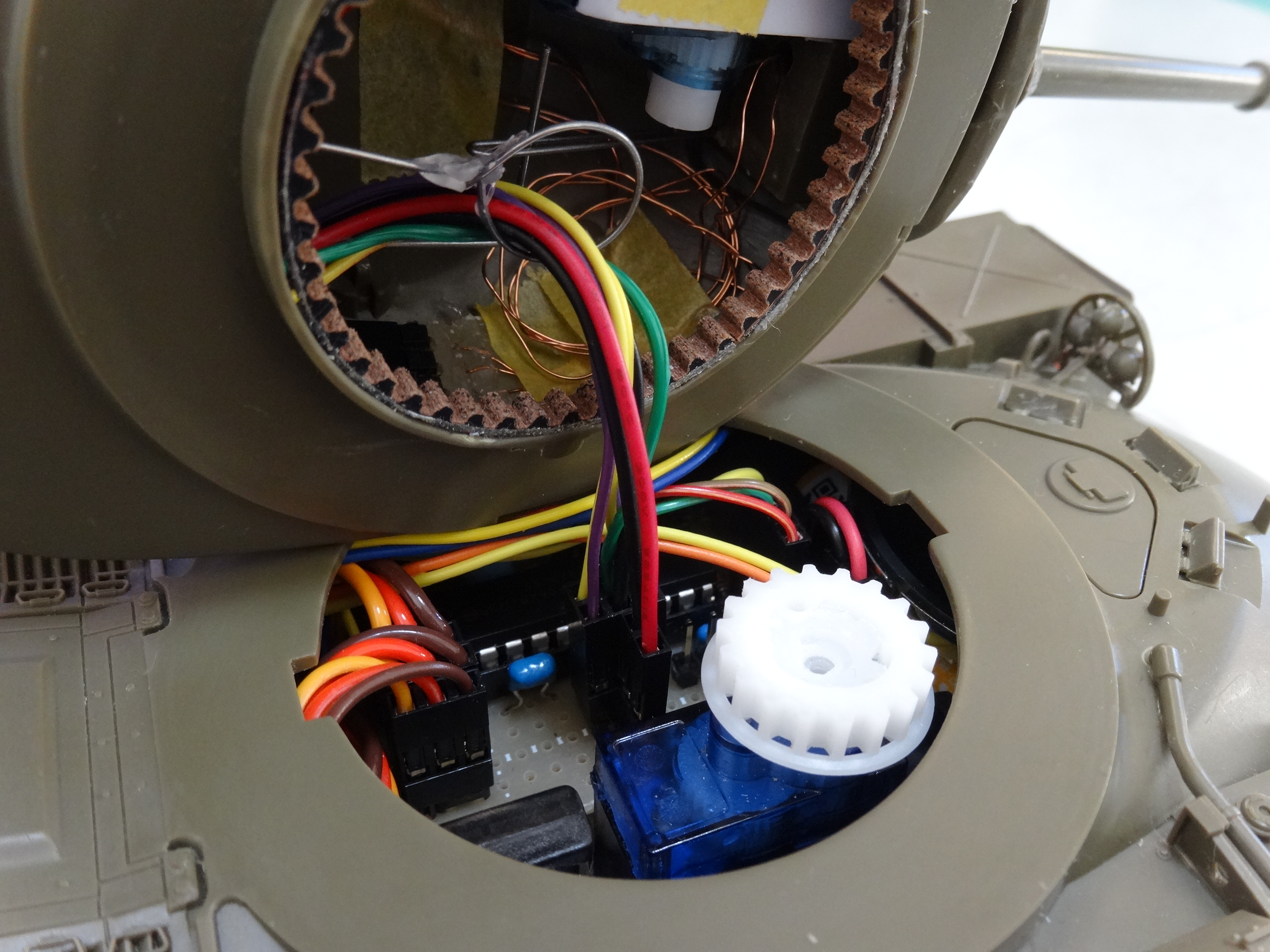 |
| パーツで隙間がありません。 | 中央にマイコンとUSBドングルを配置 | 砲塔内からの配線ケーブル。 巻き付き防止の為に中央のリングに通しています。 |
マイコン基板中央部のコネクタに接続 |
 |
 |
 |
| パーツを外すとこんな感じ。 電池BOXの下に電源スィッチを配置。 |
可動サスペンションのピアノ線です。 | 基板からの配線は全てコネクタにしてメンテナンスを容易にしました。 |
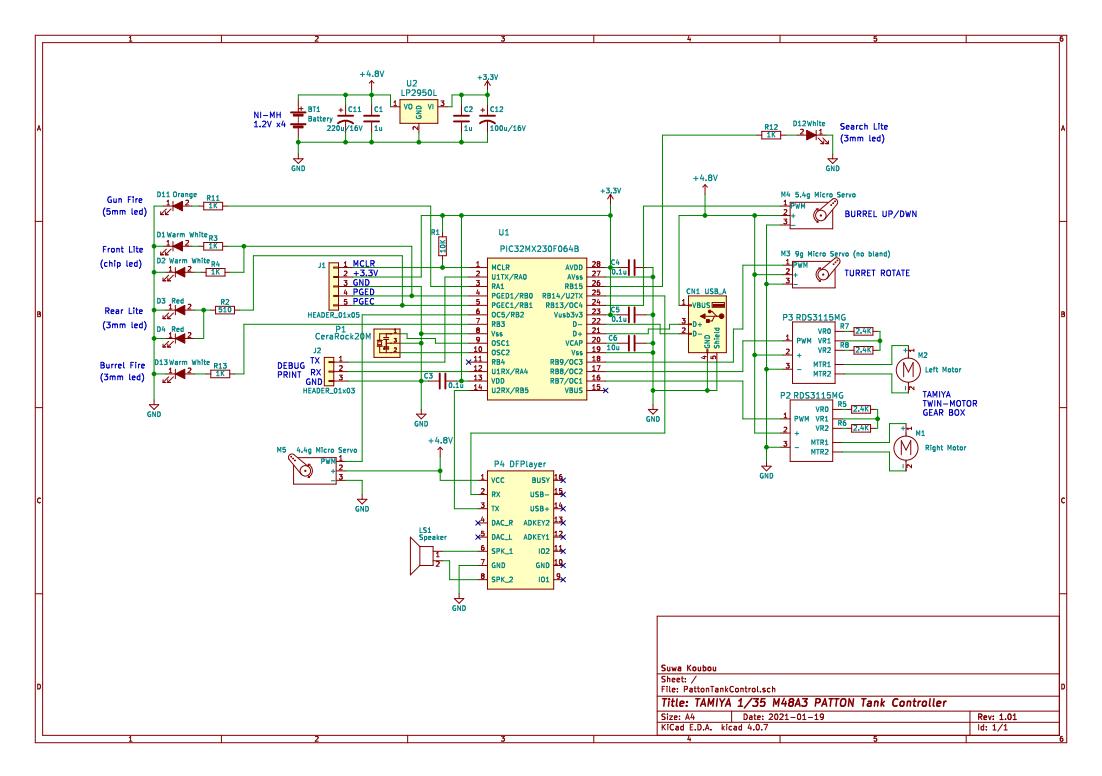
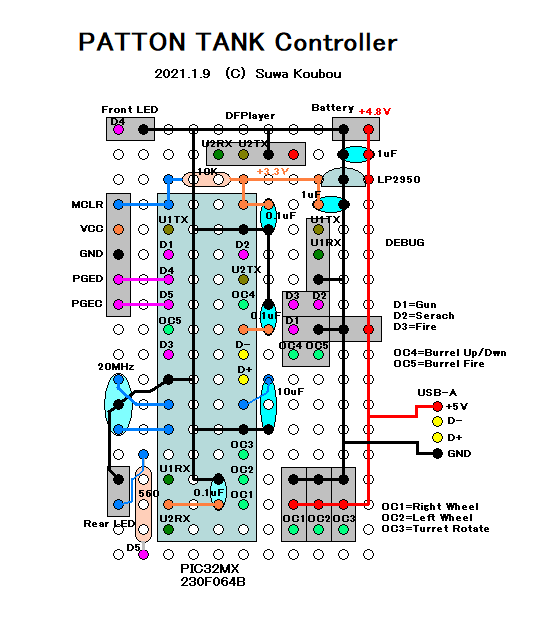
4. 全体回路図とマイコン基板実態配線図(部品配置図)
ファームウエア作成の元になる全体回路図とマイコン基板の部品配置図です。
 |
 |
5.PICファームウエアの作成
PICのファームウエアは、MPLAB IDE上で、C言語を使って作成しました。作成したソースコードは以下の通りです。(一部 Microchip のコードを含みます)
main.c Compiler.h GenericTypeDefs.h HardwareProfile.h p32mx230f_ceramic_20_config.h typedef.h debug.h btHID.h btHID.c delay.h delay.c dfplayer.h dfplayer.c ds4.h ds4.c timer.h timer.c uart1.h uart1.c uart2.h uart2.c usbHost.h usbHost.c6.最後に
実の所、戦車を始めとする兵器模型については、年を経るに従ってだんだんと製作への抵抗感が強まり、ここ10数年はほとんど作ったことがありませんでした。
兵器模型を製作してそれで遊ぶことが、直ちに戦争賛成に繋がる訳では勿論ありませんが、兵器模型から戦争の悲惨さを嫌でも想像させられてしまい、どうにもやるせない思いになってしまうのが嫌だったのです。
ネットで改造記事を見ますと作者さんは結構年配の方が多いように見受けられます。子供の頃にモーターで動く戦車模型で遊んだ楽しい記憶が忘れられないようです。
そんな思いが私にも沸いてきて、元々が電子工作好きということもあって、今回、戦車模型の改造となった次第です。
さて、今回の出来栄えはというと、先人の後追いで、まだまだ不満だらけという所でしょうか。
使ったマイコンは、プログラムメモリや処理にまだまだ余裕があります。ジャイロセンサーや加速度センサー(IMU)を搭載すれば、砲身の照準ロックなどの機能も実現できます。
障害物検知センサーなどを搭載すれば自律走行も夢ではありません。更にサスペンションをコントロールできるようにすれば、車高を下げたり上げたり出来るでしょう。
とはいえ、1/35のサイズに収めたりするのは容易ではありません。また今回のマイコンは処理能力はありますが入出力ピンが少ないのでこれ以上の機能追加は難しいです。
マイコンをもう少しピン数の多い物にして専用の基板を作成する必要があるかと思います。
この戦車はまだ塗装作業が残っています。完成の暁に、また気が向けば新たな戦車模型の改造に挑戦してみたいものです。
(2021.3.14 追加)塗装完了
塗装作業が終了しました。塗装の結果は以下の写真になります。クリックで拡大します。
パットン戦車はベトナム戦争で活躍したとのことです。そこで、ジャングルを駆け抜けて土埃にまみれ泥に汚れた戦車にしてみました。
缶スプレーやエアーブラシなどは使わず全て筆塗りで行っています。経験不足で仕上がりは今ひとつですが、御覧頂ければ幸いです。
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |