| タミヤ 1/35 ドイツ・ケッテンクラートのラジコン化 | 2021.5.30 |
-
はじめに
 |
| タミヤの1/35 ドイツ・ケッテンクラート |
ケッテンクラートは、小型三輪のハーフトラックともいうべきユニークなスタイルで、優れた路外性能と軽快な機動力で広く使われたそうです。
1.ラジコン化
このキットは仕上がりサイズが手のひらに乗るほどの小さなものです。これを動くようにするには、モータやギヤ機構、電源、制御回路の組み込みに一工夫が要りそうです。
制御回路は回路規模が大きくならないように8ピンのPICと赤外線受信器、ノーブランドのサーボーモーターから取り外したサーボ基板を使うことにしました。
電源は、NI-MHの2.4Vの小さな充電池を使うことにしました。電池を充電するための専用の簡易充電装置も作ることにしました。
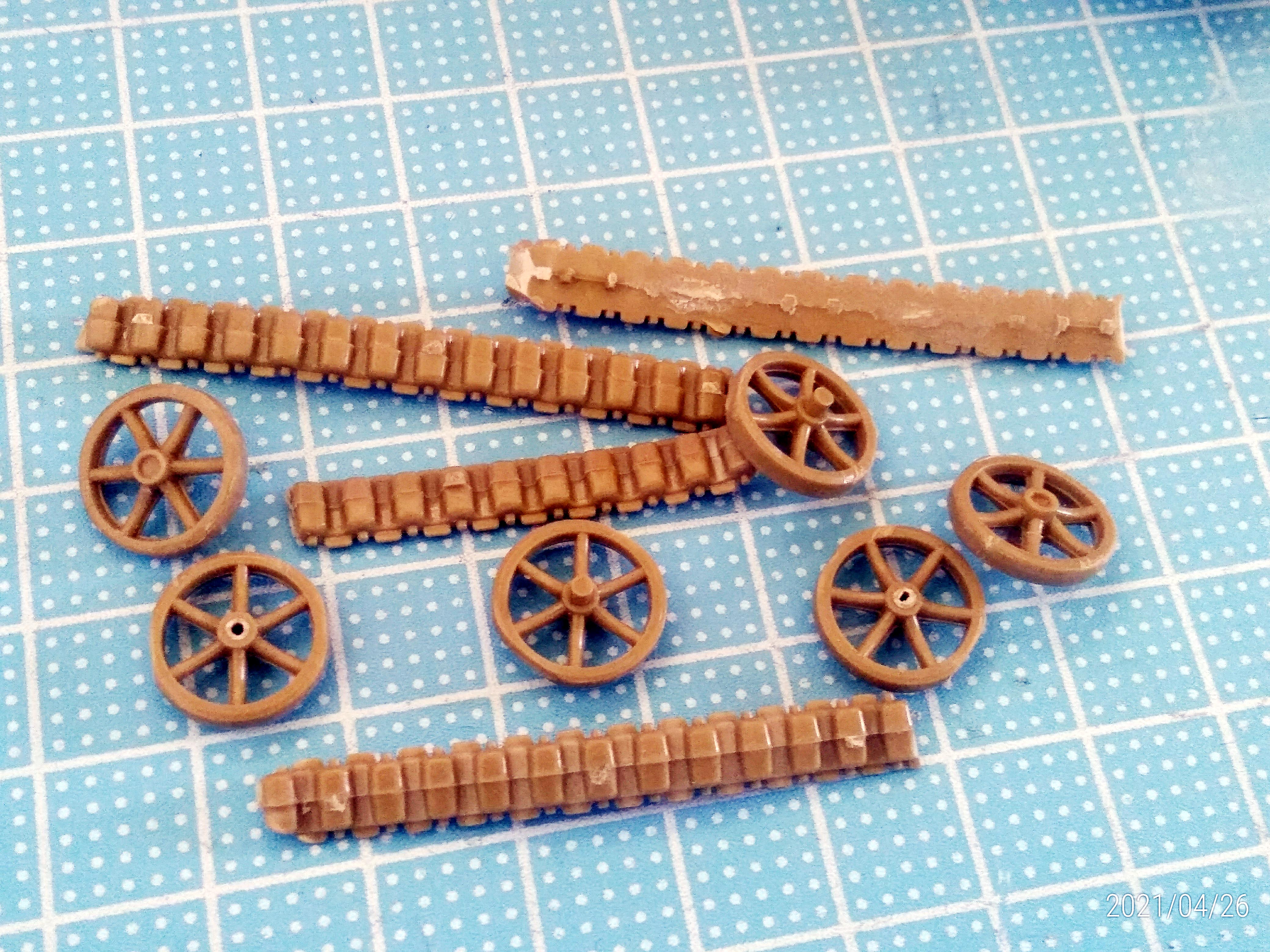
このキットでは組立て易くするために履帯と車輪が全て一体の物として成型されています。まずは、一体成型物から車輪を切り離して、車輪が回転するような加工が必要です。
 |
 |
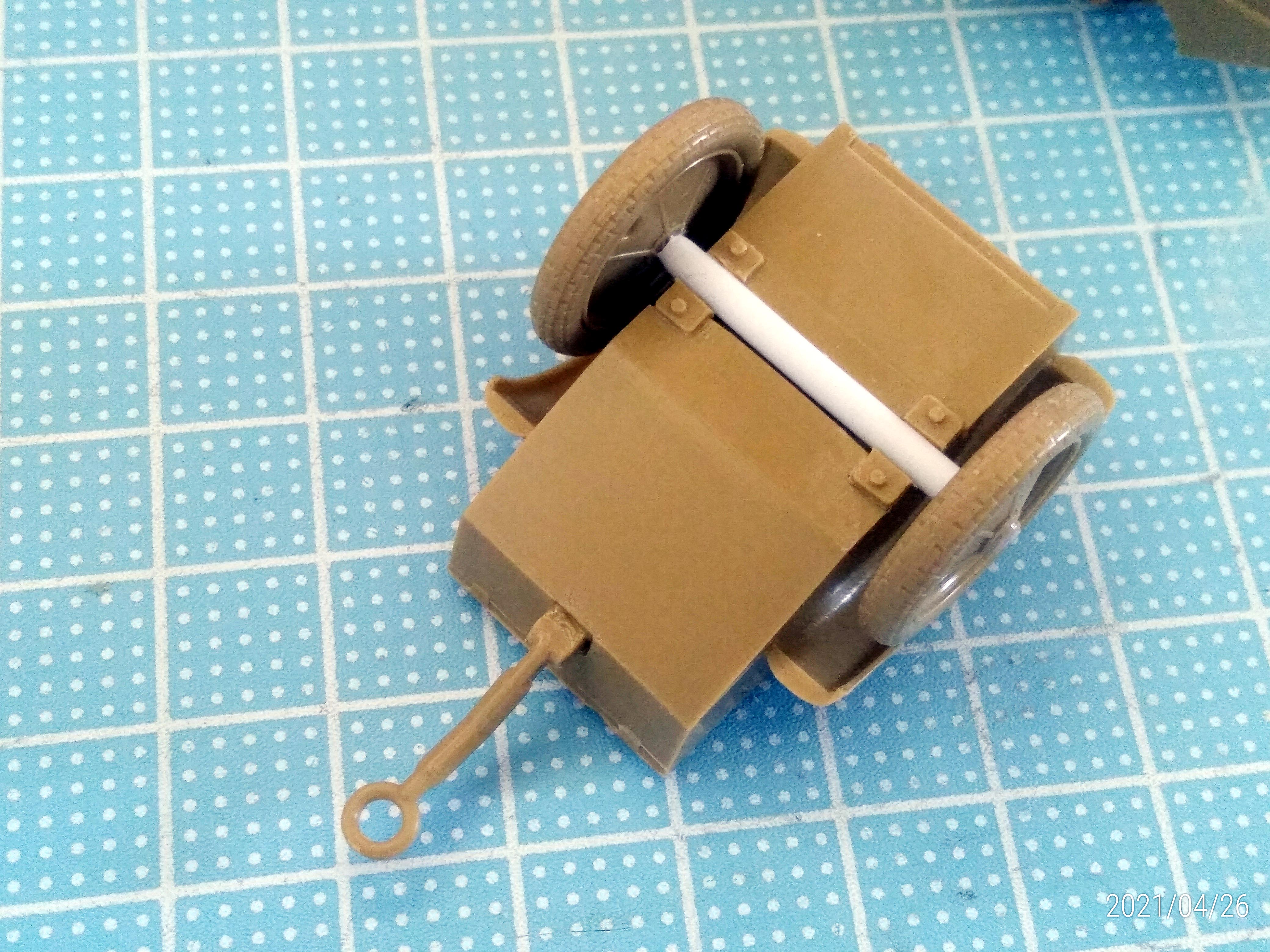 |
| 一体成型された履帯と車輪を丁寧に切り離します。切り離した履帯は使いません。 | 前輪パーツも回転するように改造しました。 | トレーラーの車輪も回転するようにします。 |
 |
 |
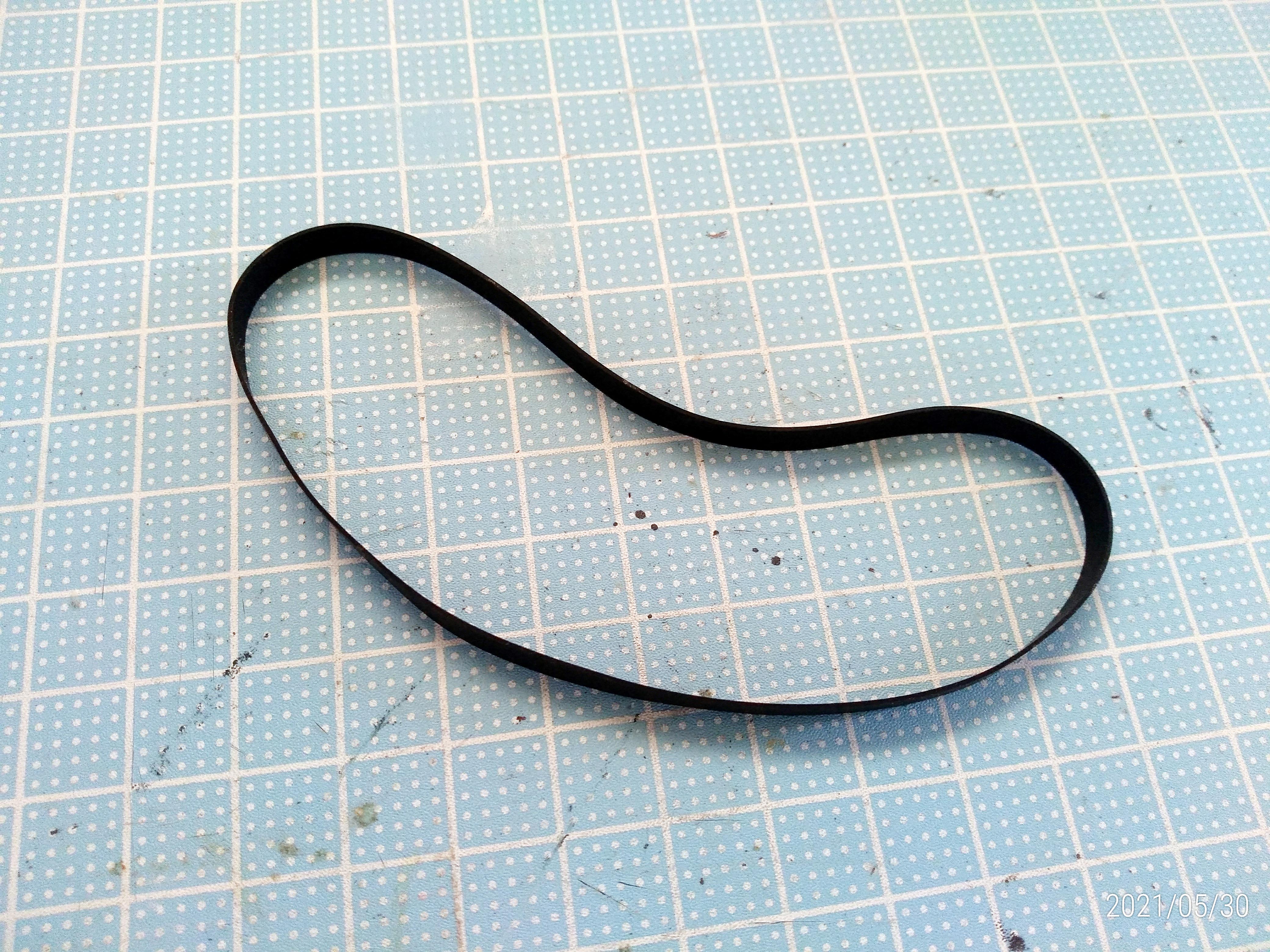 |
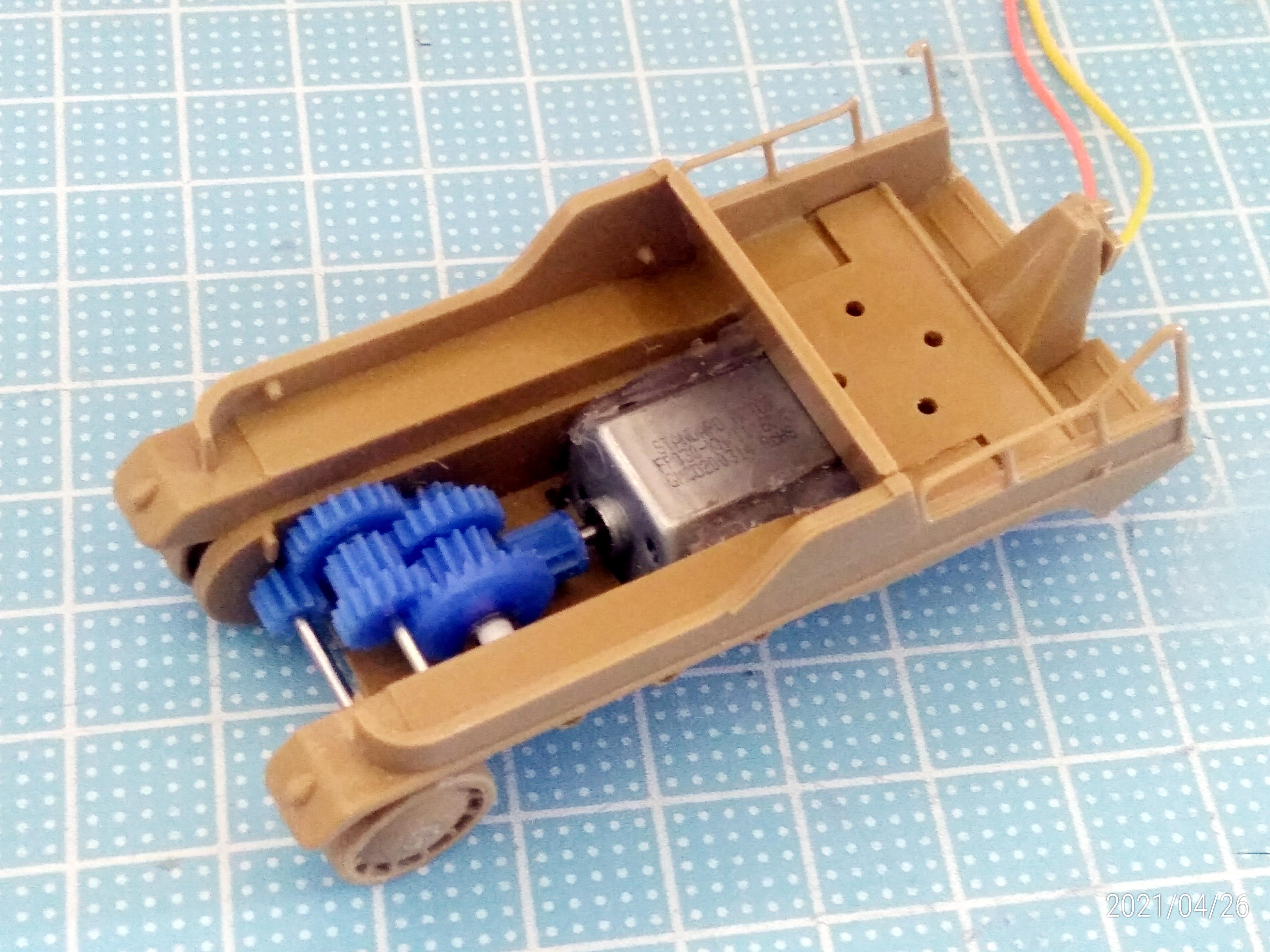
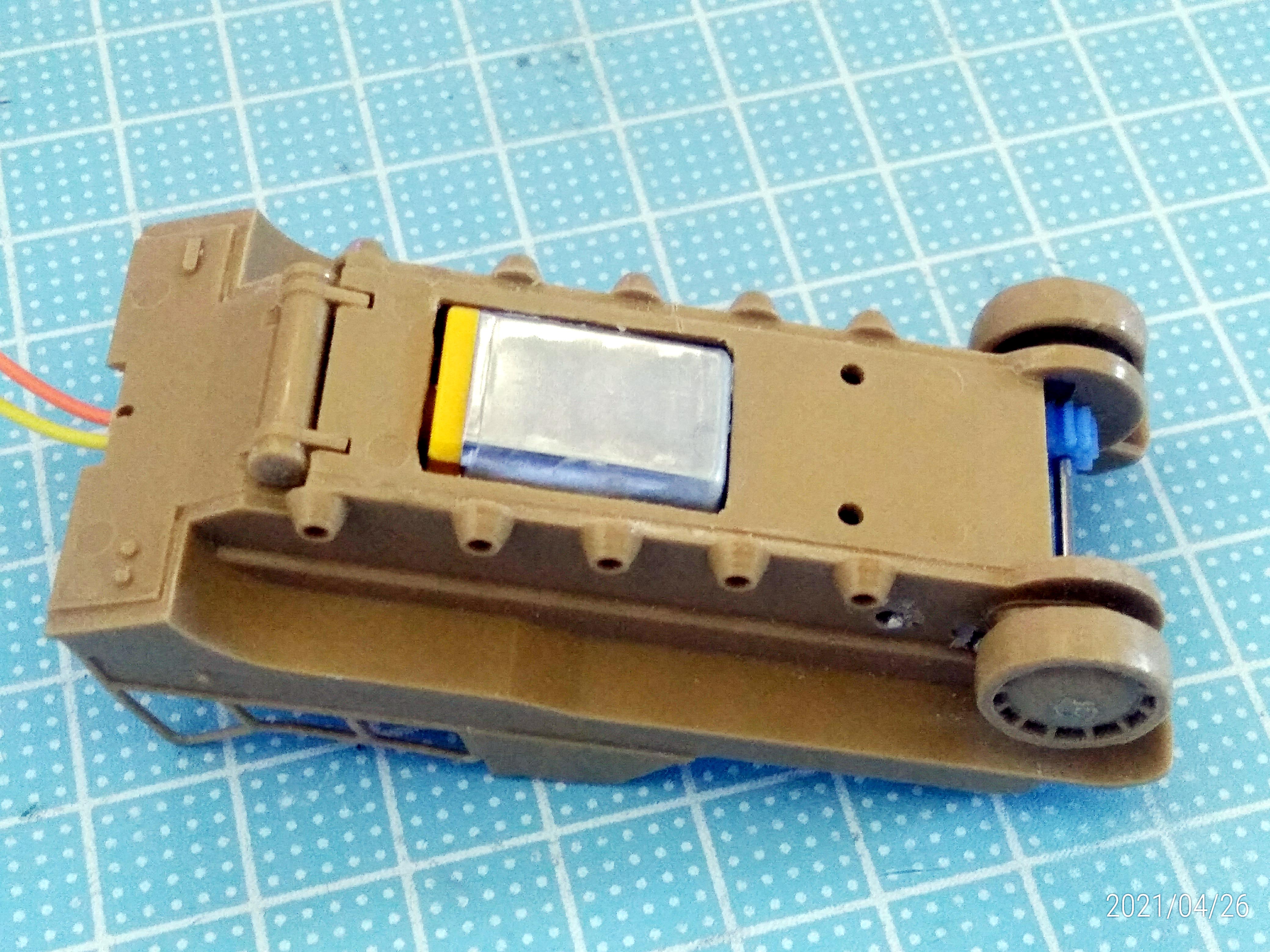
| タミヤの工作シリーズのミニモーターとギヤを組み込んでみました。 | モーターを組み込むためにシャーシー底面の一部をカットしています。 | 履帯(キャタピラ)は0.5m厚の平ゴムで作成します。 |
2.制御回路
赤外線送信機やPICのファームウエアは、8トン・ハーフトラックのものをほぼそのまま使い廻ししました。
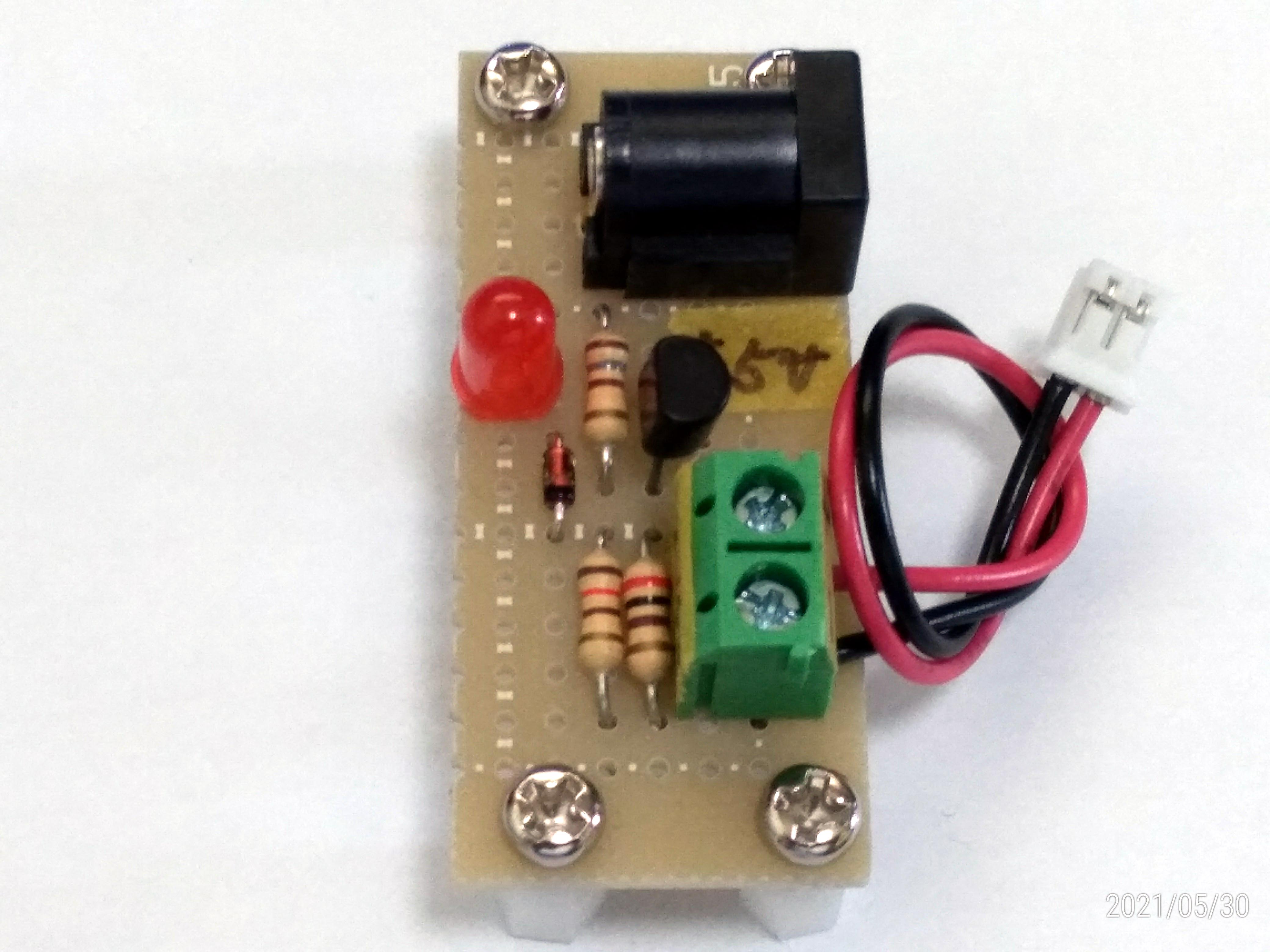
電池の充電装置は、トランジスタ1石で作成しました。自動的に充電停止するような回路ではありませんので充電中に時々電池電圧を測定して満充電になったタイミングで手動で停止します。充電電流は、約11mAと小さく過充電にはなりにくく電池はほとんど発熱しません。数時間程度で充電完了します。
サーボ基板は、ボリュームの取付位置に2キロΩのチップ抵抗を半田付けし360度回転の基板に改造しました。PICマイコンからPWMで前進・停止・後退を制御します。
制御基板の電源スィッチは、電源オフの時に充電器が接続出来るようにしました。
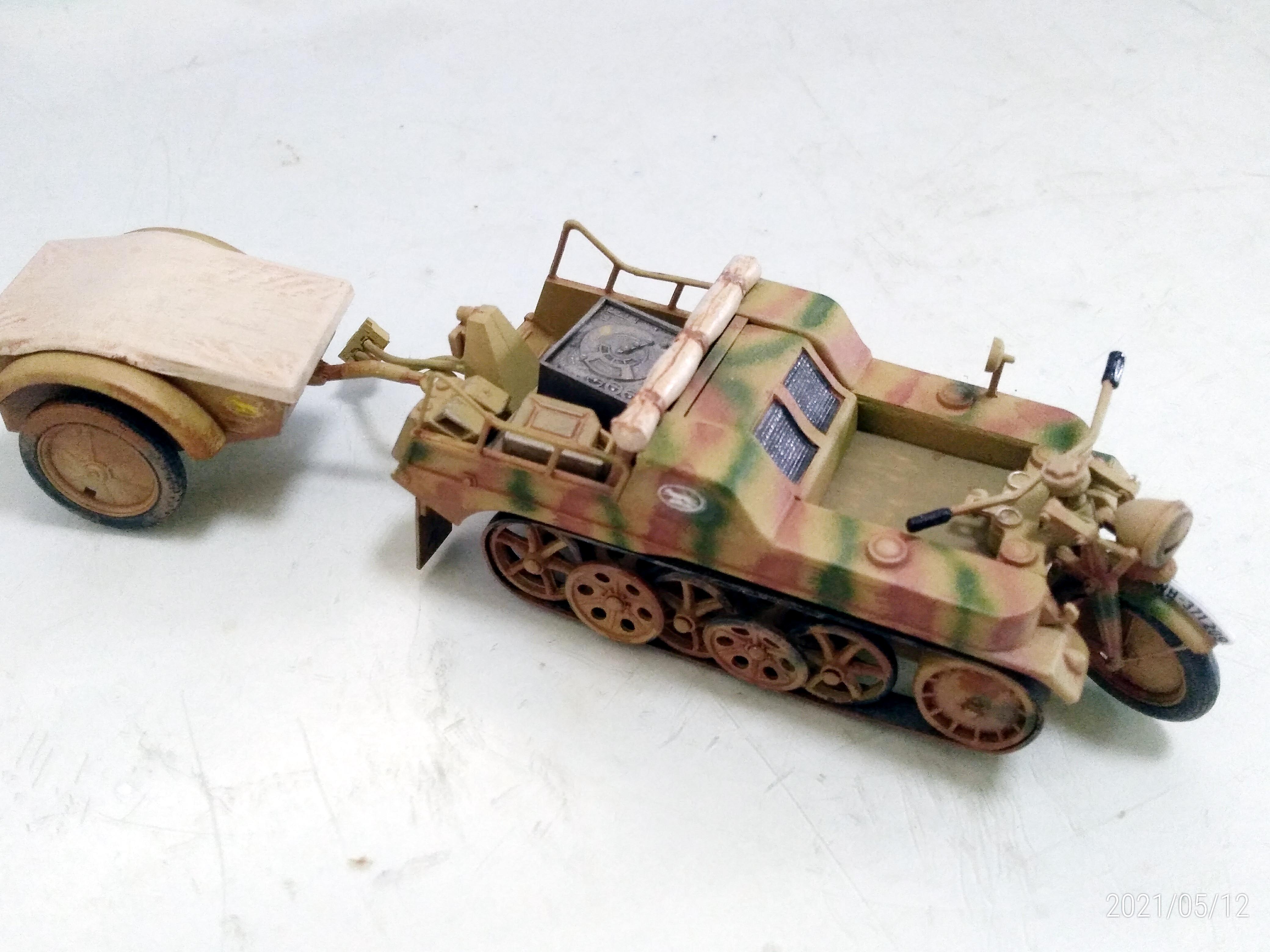
制御基板や電池を本体に組み込むことは不可能です。そこでトレーラーに搭載し引っ張って走り廻るようにしました。
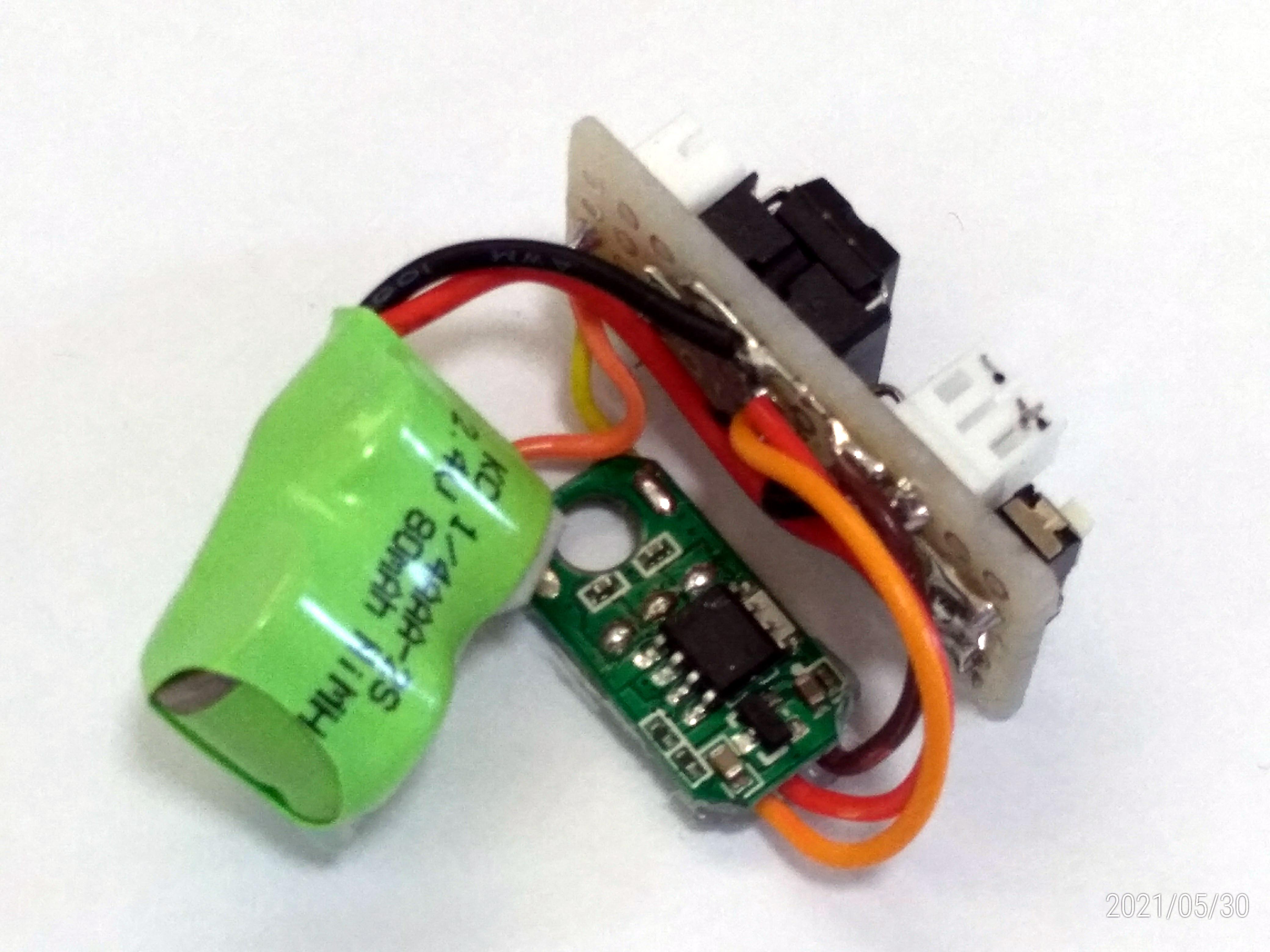
 |
 |
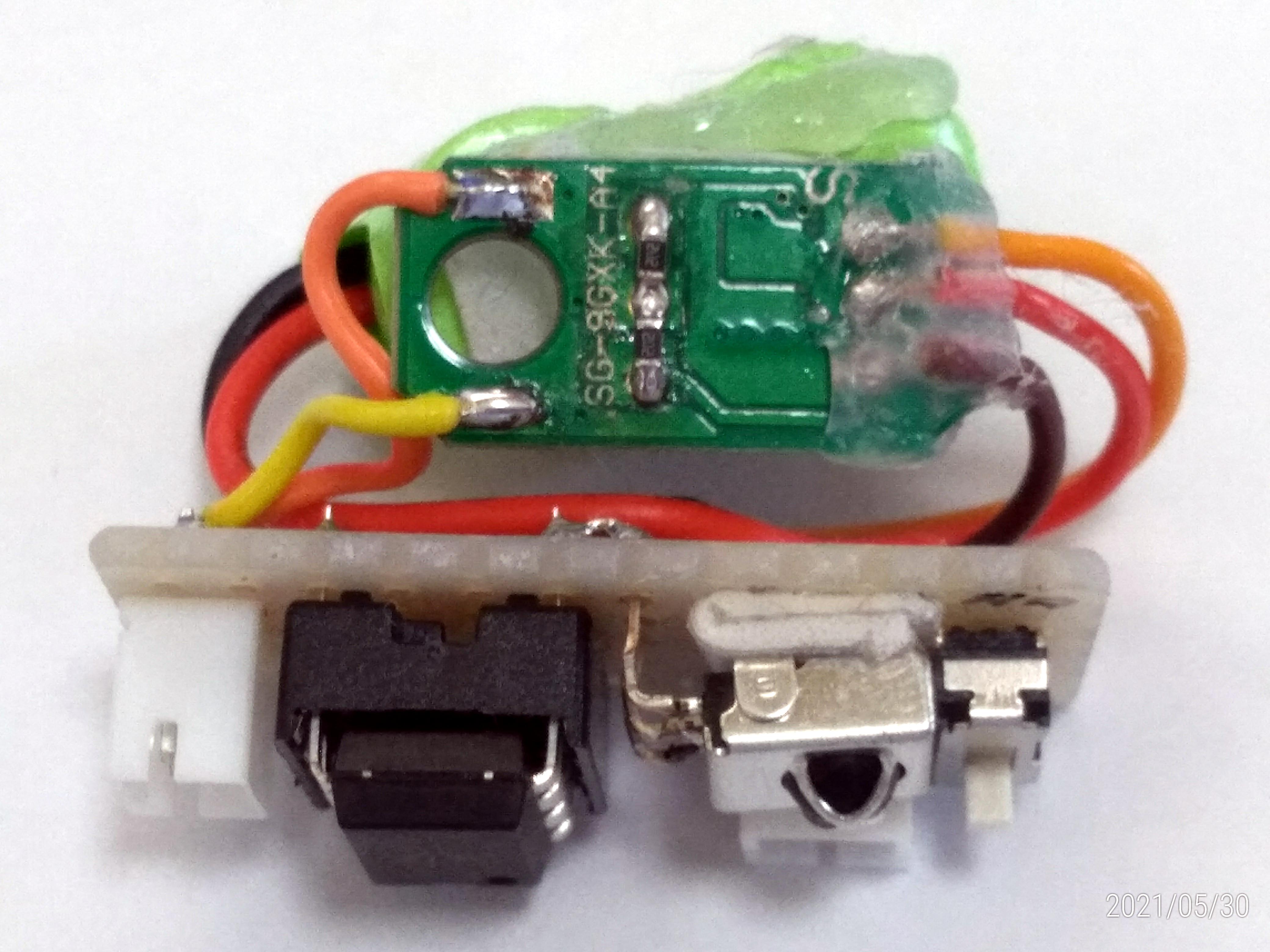 |
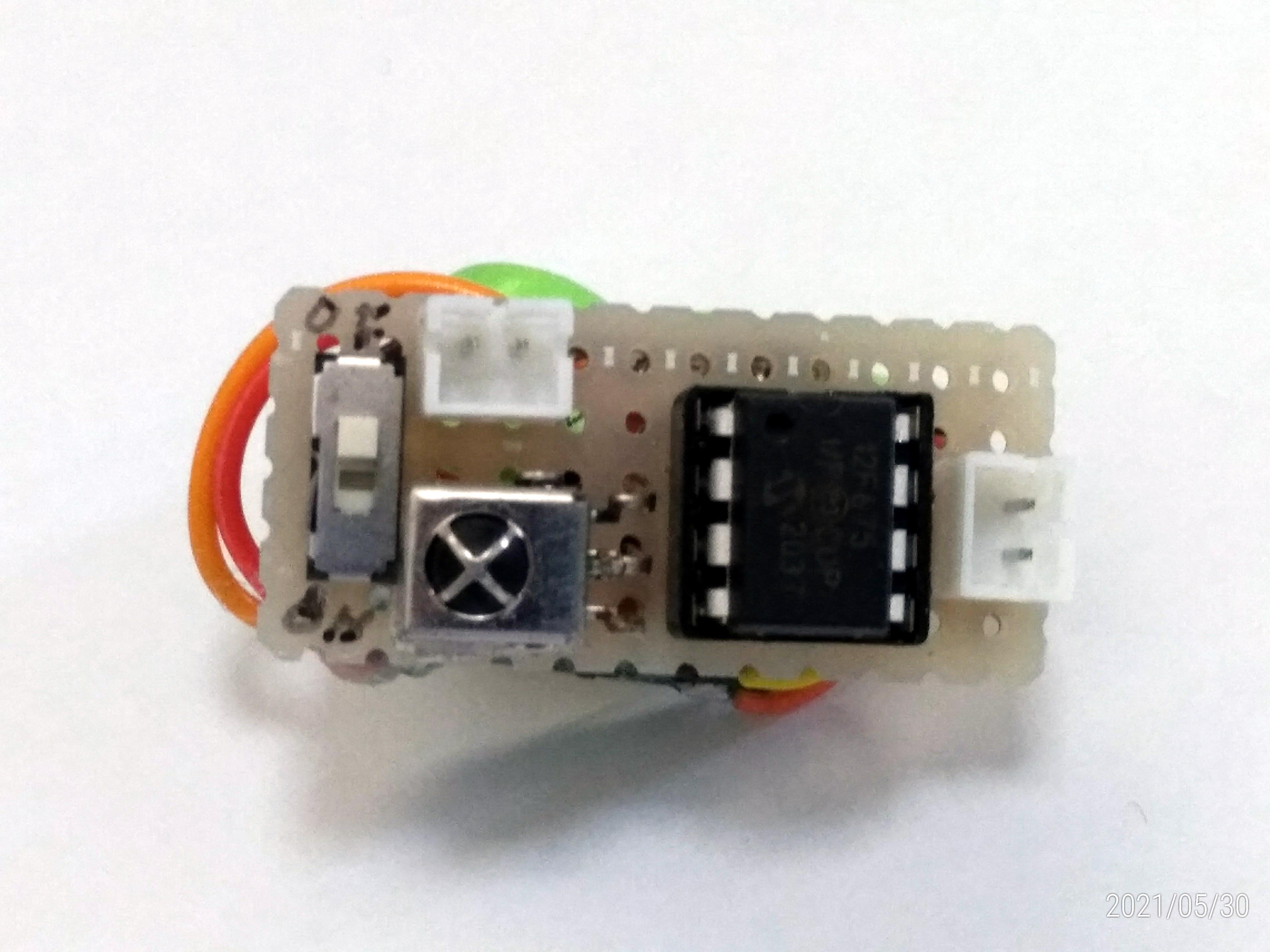
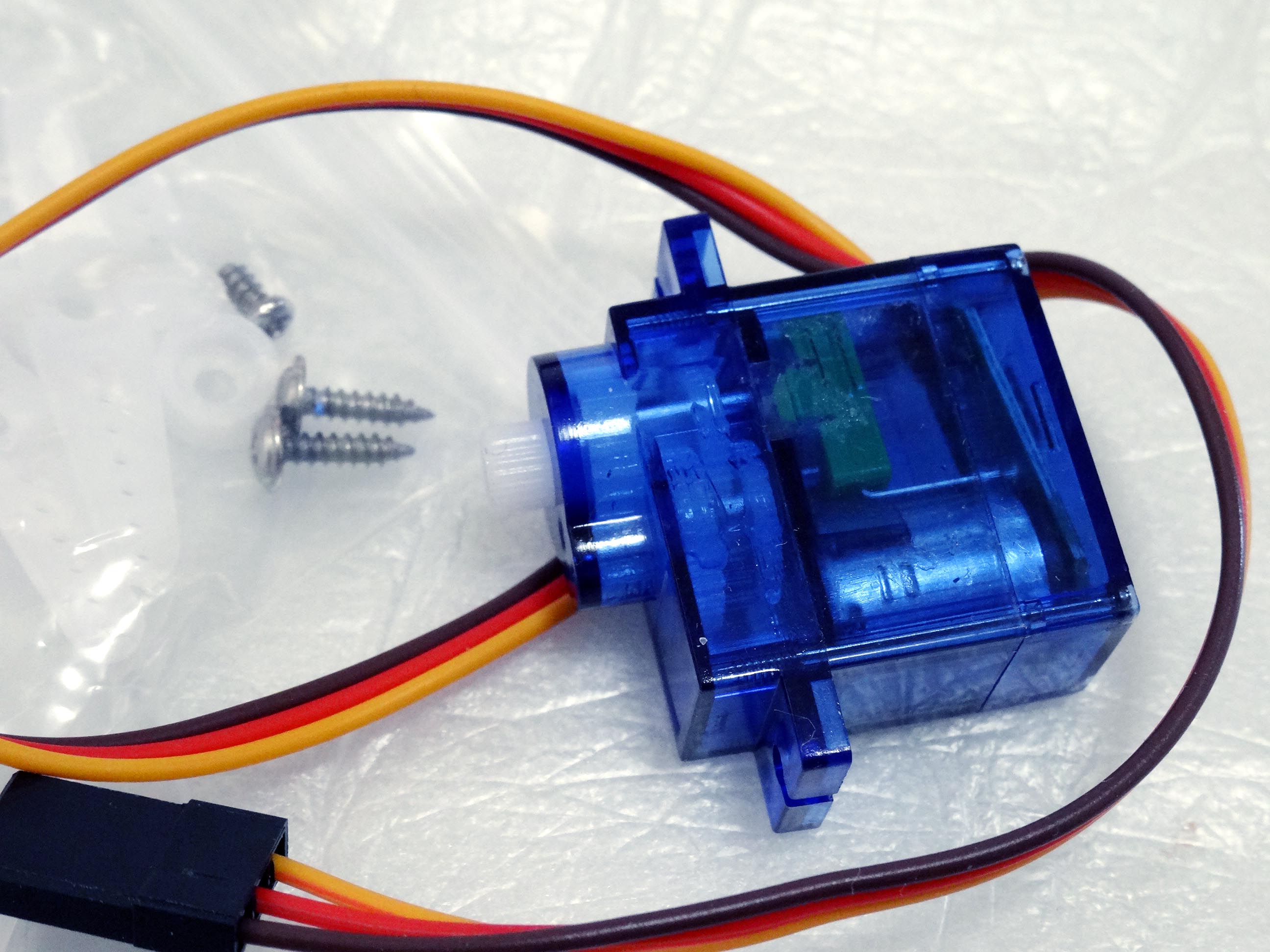
| モーター制御基板(表側)です。赤外線受信機、PICマイコン、コネクタ(充電とモーター)です。 | ノーブランドのサーボモーターから基板を外してモータードライバーとして使います。 | サーボ基板のボリューム端子に2Kのチップ抵抗を半田付けしました。 |
 |
 |
 |
 |
 |
| モーター制御基板と電池はトレーラーに搭載するようにしました。 |
塗装完成写真です。
 |
 |
 |
 |
 |
 |
全体回路図です。
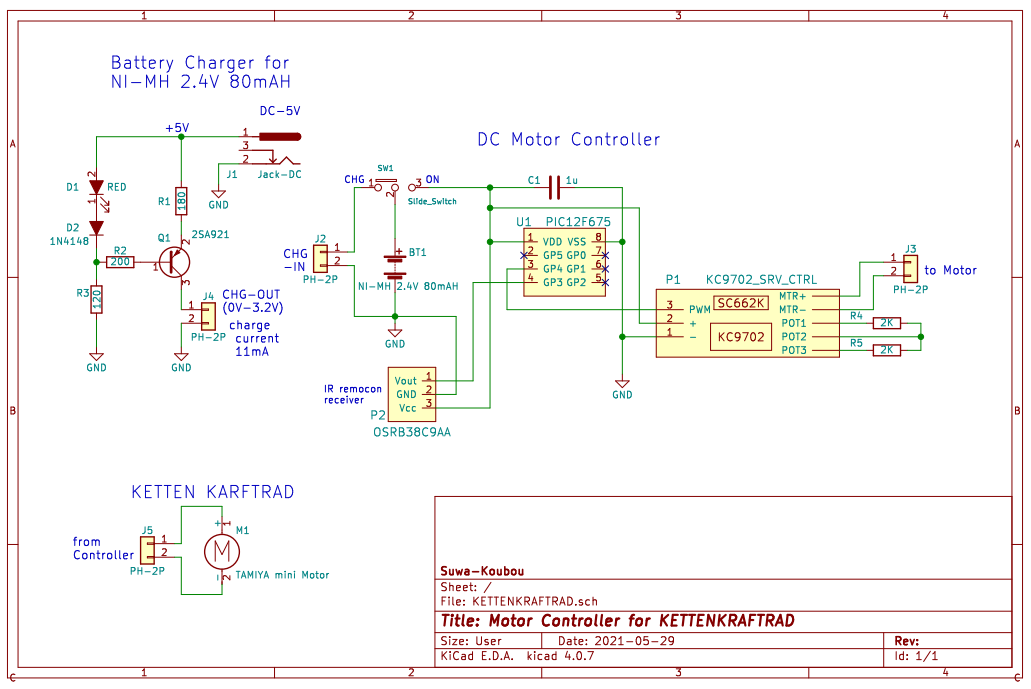 |
 |
PICのファームウエアは、MPLAB IDE上で、MPASMを使って作成しました。
作成したアセンブラソースコードは、main.asmです。